

На рис. 3 представления обобщенная структурная схема системы управления [1, 13]. Она содержит матричный (многомерный) объект P, включающий в себя весовые функции, регулятор K и матричную неопределенность . Векторный сигнал d содержит шумы, возмущения и задающие воздействия, e есть векторный сигнал, содержащий все управляемые сигналы и сигналы ошибок, u – сигнал управления, y – сигнал измерений, поступающий в обратную связь через регулятор K.
Блок-схема рис. 3 описывается следующей системой уравнений
Пусть передаточная матрица от d к e есть Tde, а приемлемая неопределенность удовлетворяет условию для некоторого .
Тогда проблема анализа состоит в том, чтобы получить ответ: является ли замкнутая система устойчива для всех приемлемых и удовлетворяется ли неравенство качества управления для заданного .
Задача синтеза состоит: в проектировании регулятора  , который бы удовлетворял вышеупомянутым условиям робастной устойчивости и качества управления.
, который бы удовлетворял вышеупомянутым условиям робастной устойчивости и качества управления.
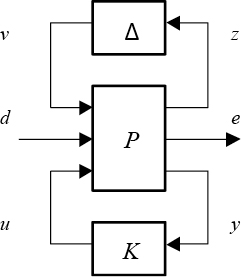
Рис. 3. Обобщенная структурная схема системы управления [1]
В зависимости от наличия или отсутствия входного сигнала d или неопределенности в схеме рис. 3 имеется четыре постановки задач устойчивости и управления.
Номинальная устойчивость (Nominal Stability). Система устойчива в отсутствии неопределенности в объекте .
Номинальное качество управления (Nominal Performance). Система удовлетворяет спецификации на качество управления в отсутствии неопределенности в объекте .
Робастная устойчивость (Robust Stability). Система устойчива при всех возмущенных объектах относительно номинальной модели, включая наихудший случай неопределенности модели .
Робастное качество управления (Robust Performance). Система удовлетворяет спецификации на качество управления для всех возмущенных объектов относительно номинальной модели, включая наихудший случай неопределенности модели .
На рис. 4 приведена структурная схема замкнутой системы, поясняющая принцип робастного управления [24, с. 62]. Здесь семейство объектов описывается множеством P, которое состоит из номинальной передаточной функции P0 с добавлением к ней множества передаточных функций , характеризующих неопределенность модели объекта: . Робастный регулятор должен гарантировать устойчивость замкнутой системы и требуемое качество управления для любого представителя модели объекта из семейства  в отличие от классического регулятора, который обеспечивает устойчивость и качество управления только для одного объекта.
в отличие от классического регулятора, который обеспечивает устойчивость и качество управления только для одного объекта.
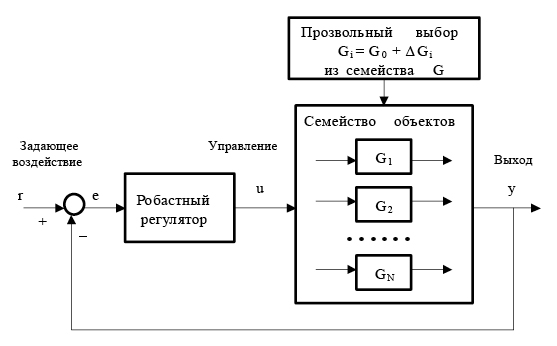
Рис. 4. Структурная схема робастной системы управления [24]