

Компромисс между хорошим качеством управления и хорошей робастностью достигается посредством частотного разделения их при формулировании задачи смешанной чувствительности следующим образом.
Вначале взвешивают So и To с помощью весовых функций W1 и W3, а затем формируют передаточную функцию Tzd от возмущения d к фиктивному выходному сигналу
Для того, чтобы добиться минимального влияния возмущения d на выход z, нужно минимизировать передаточной функции системы с учетом ограничения 2-нормы выходного сигнала при действии на вход системы сигнала, ограниченного по 2-норме, согласно следующей лемме [6]:
Лемма. Если и Z = Gw , то .
Доказательство
Тогда задача робастного управления ставится как задача H∞ оптимизации [2, 13]
(16)
где K – принадлежит множеству внутренне стабилизирующих регуляторов. При этом матричные весовые функции
выбираются так, чтобы задать границы области достижения желаемого качества управления (performance bound) и робастного запаса устойчивости (robustness bound) (рис. 2). Тогда на низких частотах
а на высоких частотах
Здесь использованы следующие неравенства [9]
.
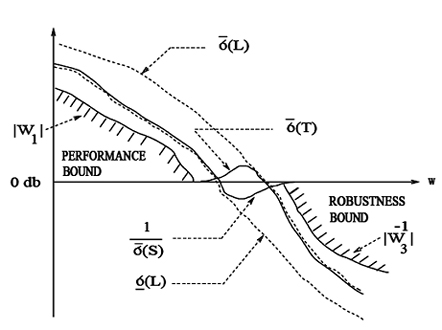
Рис. 2. Спецификация на So и To посредством частотных зависимостей сингулярных чисел [32].