

3.1. Замкнутая система управления
На рис. 1 приведена стандартная конфигурация замкнутой системы управления. Она содержит модель объекта управления P и регулятор K, замкнутые отрицательной обратной связью. На систему воздействует задающее воздействие r(t), шум датчиков (ошибки измерений) n(t), возмущение на входе объекта di(t), возмущение на выходе объекта d(t). В общем случае предполагается, что система является многомерной: сигналы являются векторными функциями времени, а передаточные матрицы модели объекта P(s) и регулятора K(s) имеют соответствующие размеры.
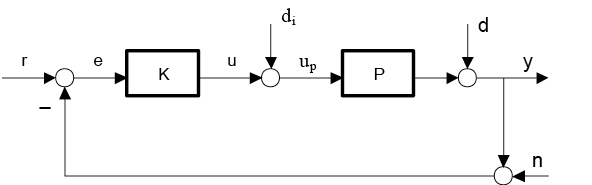
Рис. 1. Стандартная блок-схема замкнутой системы управления [13]
Введем основные матричные соотношения, связывающие различные сигналы замкнутой системы. Определим входную Li и выходную Lo матричные передаточные функции разомкнутой системы
Li = KP, Lo = PK,
где Li получается размыканием контура обратной связи на входе u объекта, а Lo – на выходе y объекта соответственно. Входная матричная передаточная функция чувствительности Si определяется как передаточная функция от di к up:
Si = (I+Li )–1, up = Sidi.
Выходная матричная передаточная функция чувствительности So преобразует сигнал d в y:
So = (I+Li )–1, up = Sidi.
Входная Ti и выходная To дополнительные матричные передаточные функции чувствительности определяются следующим образом:
Ti = I – Si = LiSi = SiLi ,
To = I – So = LoSo = SoLo .
Термин дополнительный используется для подчеркивания того факта, что To является дополнением к So, т.е.
To = I – So.
Это фундаментальное соотношение легко доказывается
So + To = (I + Lo)–1 + Lo (I + Lo)–1 = (I + Lo)(I + Lo)–1 = I.
Матрица называется входной возвратной разностью, а матрица – выходной возвратной разностью.
Определение. Замкнутая система является корректной (хорошо обусловленной), если передаточные функции, преобразующие сигналы (r, di) в (e, up), являются правильными.
Из этих правильных передаточных функций могут быть получены все другие передаточные функции замкнутой системы, которые также будут правильными. Корректность определяется следующей леммой.
Лемма [6]. Пусть . Тогда система на рис. 1 корректна, если и только если
(9)
Выполнение условия (9) означает реализуемость передаточных функций системы, т. к. каждый элемент правильных передаточных матриц имеет степень числителя не выше степени знаменателя. Входные сигналы (r, di, d, n) системы связаны с выходом y и внутренними сигналами (e, u, up) следующими соотношениями:
(10) y = To(r – n) + SoPdi + Sod,
(11) e = So(r – d – n) + SoPdi,
(12) u = KSo(r – d – n) + Tidi,
(13) up = KSo(r – d – n) + Sidi.
Первое требование, которому должна удовлетворять замкнутая система – это устойчивость. Прежде всего, система должна быть устойчива относительно входа и выхода: передаточные матрицы, преобразующие (r, di, d, n) в y, должны быть устойчивы, что эквивалентно ограниченности выхода y при ограниченности входных сигналов (r, di, d, n). Часто требуется более сильное требование к устойчивости для того, чтобы обеспечить также ограниченность внутренних сигналов. Это приводит к следующему определению внутренней устойчивости.
Определение. Говорят, что система (рис. 1) внутренне устойчива, если передаточная функция от w, d к e, up устойчива.
Т. к. это условие обеспечивает устойчивость всех других передаточных функций системы, то ограниченные сигналы (r, di, d, n) вызывают ограниченные выход y и внутренние сигналы e, up.
Лемма [6]. Пусть , тогда система с обратной связью на рис. 1 внутренне устойчива, если и только если
(14)
Одной из целей корректной и внутренне устойчивой системы управления, удовлетворяющей (9), (14), является слежение выхода y за задающим воздействием r. (Если r=const, то решается задача стабилизации). Из (11) следует, что So преобразует r в сигнал ошибки er = Sor. Тогда на любой частоте ω хорошее слежение может быть достигнуто при низкой выходной чувствительности, поскольку
Если So=0, то To=I и тогда возможно точное слежение во всем частотном диапазоне. Такое слежение требует большого коэффициента усиления разомкнутой системы . На практике это возможно только в ограниченном диапазоне частот.
3.4. Подавление выходного возмущения
Из (10) вытекает, что So преобразует d в компоненту yd = Sod. Тогда для ослабления действия выходного возмущения d на выход объекта y, необходимо также иметь малую величину выходной чувствительности
Слежение и подавление выходного возмущения имеют согласующиеся цели, которые могут быть достигнуты посредством обеспечения малости коэффициента усиления оператора выходной чувствительности.
К сожалению имеются жесткие противоречия при выборе , поэтому способ синтеза регулятора  должен включать достижение некоторого компромисса. Первое противоречие касается подавления шума датчиков. Из (10) и схемы рис. 1 ясно, что поскольку после сумматора сигналы r и n становятся неразличимы, то хорошее слежение за задающим воздействием r приводит также к хорошему слежению и за шумом n. Действительно, выходная компонента сигнала, вызванная шумом, определяется так yn = – Tn. Тогда для подавления шума отношение
должен включать достижение некоторого компромисса. Первое противоречие касается подавления шума датчиков. Из (10) и схемы рис. 1 ясно, что поскольку после сумматора сигналы r и n становятся неразличимы, то хорошее слежение за задающим воздействием r приводит также к хорошему слежению и за шумом n. Действительно, выходная компонента сигнала, вызванная шумом, определяется так yn = – Tn. Тогда для подавления шума отношение
должно быть мало, что приводит к малости коэффициента усиления разомкнутой системы , т.к. To = (I + Lo)–1 . Таким образом, для подавления выходного возмущения и шума должны одновременно быть малыми So и To, что невозможно из-за тождества To + So = I. Это противоречие между целями слежения (или подавления выходного возмущения) и подавления влияния шума разрешается посредством частотного разделения.
На низкой частоте, когда важно слежение, а шум датчиков мал, приемлем большой коэффициент усиления разомкнутого контура, который приводит к хорошему слежению и подавлению низкочастотного возмущения.
С другой стороны, на высоких частотах может доминировать шум над спектром полезного сигнала, и поэтому шум здесь должен быть подавлен. Более того, хорошее слежение на высоких частотах может привести к неприемлемым управляющим воздействиям, вызывающим насыщение исполнительных устройств, поэтому в этом случае требуется низкий коэффициент усиления разомкнутого контура.
Второе противоречие связано с выбором функции чувствительности низкого уровня по отношению к робастности замкнутой системы.
Пусть P есть заданная номинальная модель объекта, чьей «верной» передаточной функцией является Pt. Предположим, что Pt располагается «по соседству» от P, что можно описать выходной мультипликативной неопределенностью вида
(15)
Для этого типа непараметрической (неструктурированной) ошибки модели, величина обычно выбирается как возрастающая функция частоты ω. Для того, чтобы достигнуть хороших робастных запасов устойчивости, размер величины ошибки моделирования , которая входит в (15) без дестабилизации номинально устойчивой замкнутой системы, должна быть как можно больше. Если регулятор внутренне стабилизирует номинальный объект P, и как Р, так и Рt имеют одно и то же количество полюсов в , то размер наименьшей неопределенности , для которой система становится неустойчивой, есть [8, 9, 11]
Этот результат можно также трактовать с точки зрения теоремы о малом коэффициенте усиления для конфигурации .
Теорема (о малом коэффициенте усиления – Small Gain Theorem) [1, 13]. Пусть и . Тогда конфигурация с обратной связью корректна и внутренне устойчива для всех и
Таким образом, чем больше , тем меньше размер наименьшей дестабилизирующей неопределенности, следовательно, хорошая робастная устойчивость требует малого коэффициента усиления разомкнутого контура Lo, в частности, на высоких частотах, где модель объекта наименее надежна.