

1.2.1. Принципы измерения силы тяжести
Для измерения силы тяжести можно использовать любые зависящие от нее физические явления: качание маятника, растяжение пружин с грузом, падение тел в пустоте и др. Методы измерения силы тяжести подразделяют на динамические, при использовании которых наблюдают движение груза в поле тяжести, и статические, подразумевающие измерение растяжения упругого элемента с грузом. Определения могут быть абсолютными и относительными. К абсолютным относятся такие методы, использование которых дает на каждой точке абсолютное, полное значение gнабл. Применение относительных методов позволяет на каждой точке определить приращения или разности по отношению к некоторой исходной точке Δgнабл. Обычно в гравиразведке для абсолютных измерений используют маятниковые приборы, а для относительных — маятниковые приборы и гравиметры.
Маятниковые методы основаны на измерении периода колебания маятника. Формула для расчета полупериода, т. е. времени (Т), необходимого для прохождения маятника от одного крайнего положения до другого, имеет вид

где l — длина маятника; α — угол отклонения. Измерив Т, l и α, можно рассчитать g. При малых α (<30′):

Сложность и громоздкость абсолютных определений g заключается в том, что для достижения точности ±1,0 мГал период колебаний необходимо измерять с погрешностью до 10–7 с, а длину маятника — с погрешностью до 0,001 мм. Абсолютные измерения обычно проводят в обсерваториях и некоторых опорных гравиметрических пунктах высшего класса.
Несколько проще с помощью маятниковых приборов проводить относительные измерения силы тяжести. При этом измеряют полупериоды колебаний маятника на опорном пункте (Т0) и рядовых точках съемки (Тi) и далее по формуле
gi = g0(T0/Ti)2 (1.19)
рассчитывают gi во всех пунктах, если известно значение g0 на опорном пункте. При относительных измерениях нет необходимости определять длину маятника, что облегчает процесс наблюдения. В маятниковых приборах часто на одном штативе устанавливают несколько (2–6) маятников, что позволяет уменьшить погрешность измерения, а главное, при регистрации разностных колебаний каждой пары маятников появляется возможность наблюдения на движущемся основании, например, на корабле при гравиметрических съемках акваторий морей и океанов.
Погрешность абсолютных измерений силы тяжести с помощью маятниковых приборов на обсерваториях может быть доведена до 1–3 мГал, при наземных относительных исследованиях — до 0,1 мГал, при работах на подводных лодках — до 1–3 мГал, при съемках на поверхности моря — до 5–10 мГал.
В практике гравиразведки широкое применение получил относительный способ измерения силы тяжести, т. е. измерения приращений в двух точках с помощью гравиметров — приборов, в которых сила тяжести сравнивается с силой деформации упругих материалов. Большинство гравиметров построено по принципу пружинных весов, где в качестве уравновешивающей силы используют силу кручения горизонтальной нити, на которой укреплен рычаг — маятник c массой т (рис. 1.3). В точке наблюдения момент силы тяжести уравновешивается моментом сил кручения, рычаг отклоняется от горизонта на угол φ и при определенных условиях основное уравнение равновесия упругой системы будет иметь вид (без учета пружин 5 и 6)

где l — длина рычага; τ — крутильная жесткость его нитей подвеса; α0 — начальный угол закручивания нитей; k — коэффициент линейной жесткости главной пружины; r — длина рычага крепления главной пружины; β — угол между рычагами.
Из этого уравнения получается зависимость между изменением угла наклона рычага и приращением силы тяжести (Δg):
Δg = C′ Δφ, (1.21)
где С′ — цена деления гравиметра по углу наклона.
Для повышения чувствительности гравиметра при малых изменениях Δg используют астазирование, т. е. применение упруго-возбужденной системы, состоящей из дополнительного рычага (r) и главной пружины 4, которые приводят к увеличению угла наклона (φ) за счет неустойчивого равновесия при малых изменениях Δg.
При измерении силы тяжести используют компенсационный метод отсчета, при котором микрометрическим винтом меняют натяжение измерительной пружины 5 таким образом, чтобы привести рычаг 3 в горизонтальное положение. Контроль положения рычага 3 относительно горизонта осуществляют по специальной шкале с помощью оптической системы. Измерение Δg сводится к взятию разности отсчетов по микрометрическому винту гравиметра между начальной (n0) и текущей точкой наблюдения (ni):

где ε′ — цена деления. С помощью диапазонного винта и соответствующей пружины 6 перестраивают диапазон прибора, что позволяет расширить интервал измерения в 10 раз и более.
Чувствительная система основных отечественных гравиметров ГНУК-А, В, С, ГНШК-А, В, С и других выполнена из плавленого кварца, хотя некоторые, в основном зарубежные, гравиметры имеют металлическую систему.
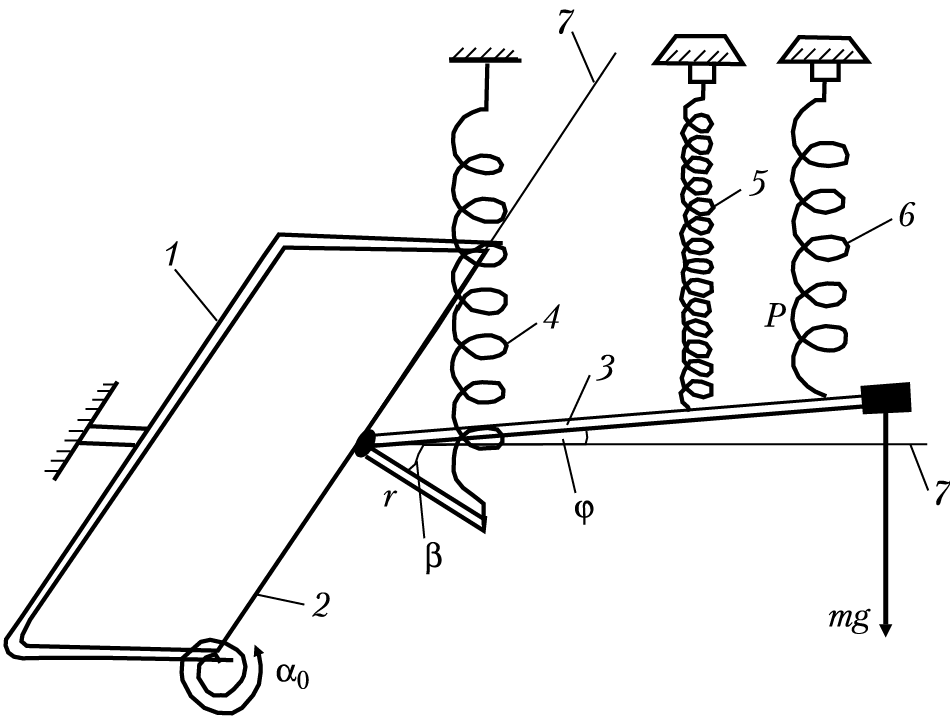
Рис. 1.3. Принципиальная схема чувствительной системы гравиметра:
1 — рамка; 2 — упругая нить; 3 — рычаг с грузиком; 4 — главная пружина;
5 — измерительная пружина; 6 — диапазонная пружина; 7 — линия горизонта
Несмотря на специально принимаемые меры по термостатированию чувствительной системы (помещение ее в сосуд Дьюара и т. п.), влияние внешних факторов, как и внутренние процессы в упругих элементах системы, приводят к изменению показаний прибора во времени. Поэтому все гравиметры характеризуются дрейфом, или смещением нуль-пункта прибора, который достигает нескольких мГал в сутки. Это свойство учитывают введением специальной поправки за смещение нуль-пункта Δgсп.
Время установки и измерения с помощью гравиметра при наземной съемке достигает 2–5 мин. Погрешность измерений (Δg) разными типами гравиметров составляет 0,01–0,5 мГал.
Для изучения силы тяжести на море применяют сильно затушенный морской набортный гравиметр (например, ГМН), в котором кварцевую астазированную систему помещают в жидкость с повышенной вязкостью.
Существуют также гравиметры для аэрогравиразведки и измерений силы тяжести вдоль ствола скважины.