

Временные разрезы впервые начали получать в морской сейсморазведке (метод одноканального непрерывного сейсмического профилирования – НСП) в 50-е годы прошлого века, постепенно и результаты многоканальной сейсморазведки, как морской, так и сухопутной стали представлять в таком виде. Как уже говорилось выше, сейсмические временные разрезы очень похожи на геологические разрезы, поэтому они понравились даже геологам, появились даже такие направления на стыке сейсморазведки и геологии, как сейсмостратиграфия, сейсмолитология. Некоторые геологи даже стали сами перерисовывать временные разрезы в глубинные геологические, без учета их специфики.
А ведь на временных разрезах геологические границы часто искажаются, на них присутствуют различные помехи. Собственно борьбе с помехами и были посвящены предыдущие задачи данного пособия. Теперь рассмотрим некоторые виды искажений форм границ на временных разрезах и возможности их исправления.
Первое, очевидное искажение, собственно почему сейсмический разрез называется временным, это то, что на временном разрезе регистирруются времена прихода отраженных волн, которые при совмещении источника и приемник в одной точке на поверхности определяются по формуле (рис. 1)
 , (1.1)
, (1.1)
где h – глубина границы, V – скорость сейсмических волн в покрывающей толще.
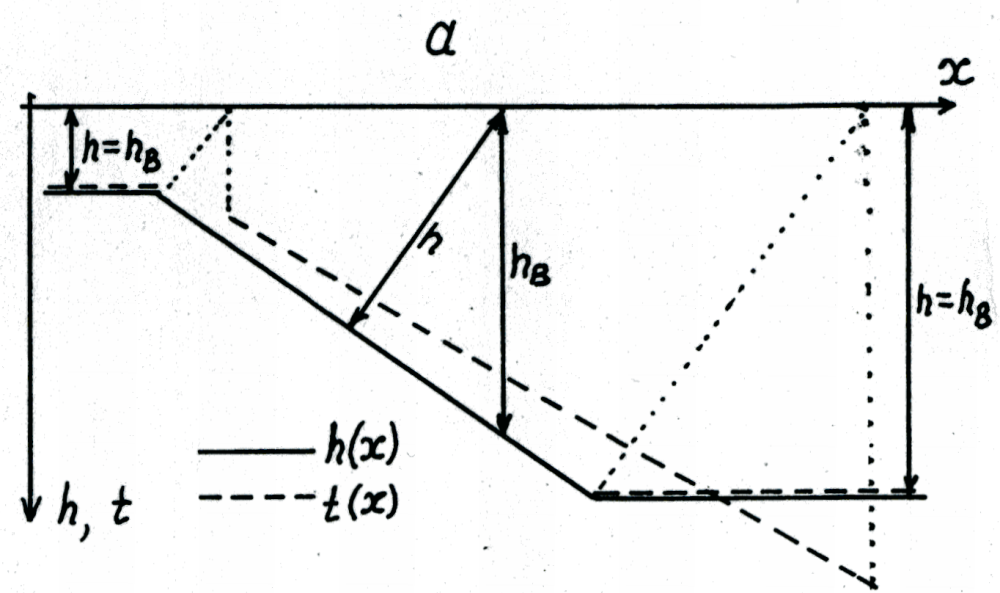
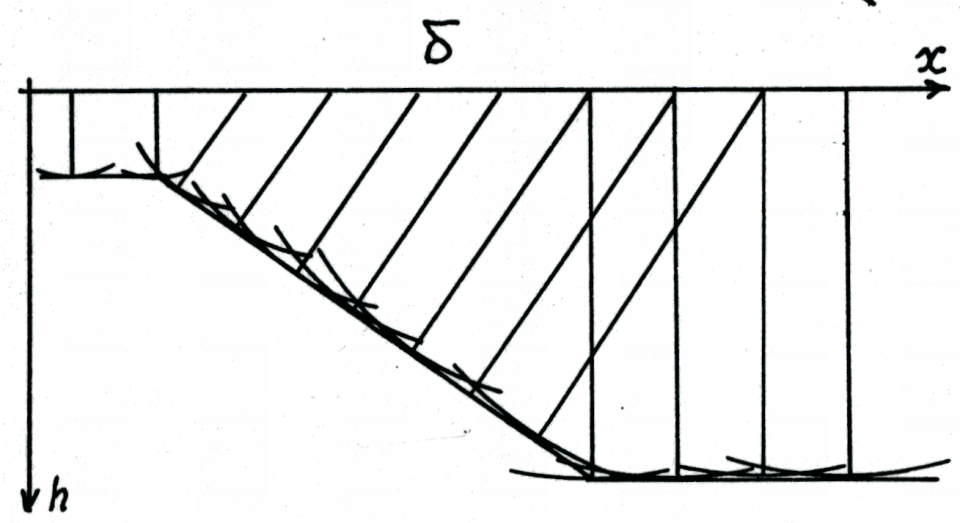
Рис. 7.1. Искажения форм границ на временном разрезе – простой случай:
a) отражающая граница (сплошная линия) и ее отображение на временном разрезе
(пунктирная линия); b) построение отражающей границы способом засечек
В принципе, перейти от времен к глубинам можно очень просто по формуле
 , (1.2)
, (1.2)
если знать скорости сейсмических волн в отложениях. В системе RadExPro есть такая процедура , которая преобразовывает временной разрез в глубинный, если задан скоростной закон. Однако эта процедура просто пересчитывает времена на глубины, не исправляя искажения за счет сейсмического сноса при негоризонтальных границах.
Искажения форм границ на сейсмических временных разрезах происходят из-за того, что отраженная волна возвращается к источнику при нормальном падении на границу (эхо-глубина), а не по вертикальному лучу, в то же время на временном разрезе сейсмическая трасса рисуется вдоль вертикальной линии (рис. 7.1, a).
Еще до появления временных разрезов в сейсморазведке существовал способ засечек для построения отражающих границ – в каждой точке наблюдений строили окружности радиусом  , а границу проводили как касательную к этим окружностям (рис. 7.1, b). Тем самым находили истинное положение границ (в пределах геометрической сейсмики). Естественно, сами вступления отраженных волн должны были быть прослежены по исходным сейсмограммам.
, а границу проводили как касательную к этим окружностям (рис. 7.1, b). Тем самым находили истинное положение границ (в пределах геометрической сейсмики). Естественно, сами вступления отраженных волн должны были быть прослежены по исходным сейсмограммам.
Способ миграции в простейшем варианте как бы проделывает такую же операцию для каждого отсчета каждой трассы (перемещает этот отсчет по окружности – мигрирует по соседним трассам). В результате, если скорость для среды правильно задана, дифракционные волны, которые имели гиперболические оси синфазности на исходных временных разрезах, сфокусируются в точки, а отраженные волны соберутся в соответствующих истинному положению границ местах. В отличие от старого способа засечек, в данном случае нет необходимости заранее прослеживать отраженные волны, да это и невозможно в случае сложного рельефа отражающих границ (рис. 7.2), а на мигрированном разрезе границы приобретают более простые, более близкие к реальным формы (рис. 7.9, рис. 7.10).
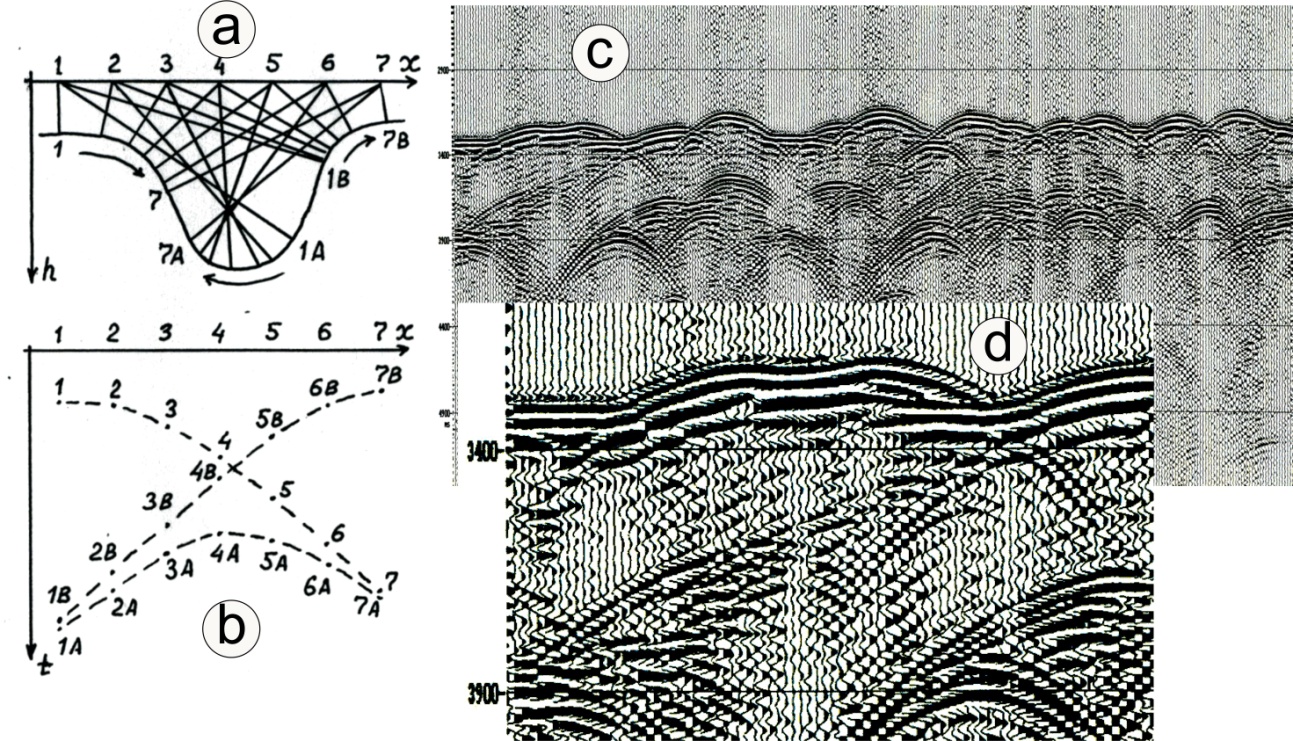
Рис. 7.2. Искажения форм границ на временном разрезе – сложные формы рельефа:
a) отражающая граница вогнутой формы и траектории отраженных волн;
b) расчетные оси синфазности соответствующих отраженных волн на временном разрезе;
c) фрагмент реального временного разреза при сложном рельефе дна;
d) увеличенный фрагмент
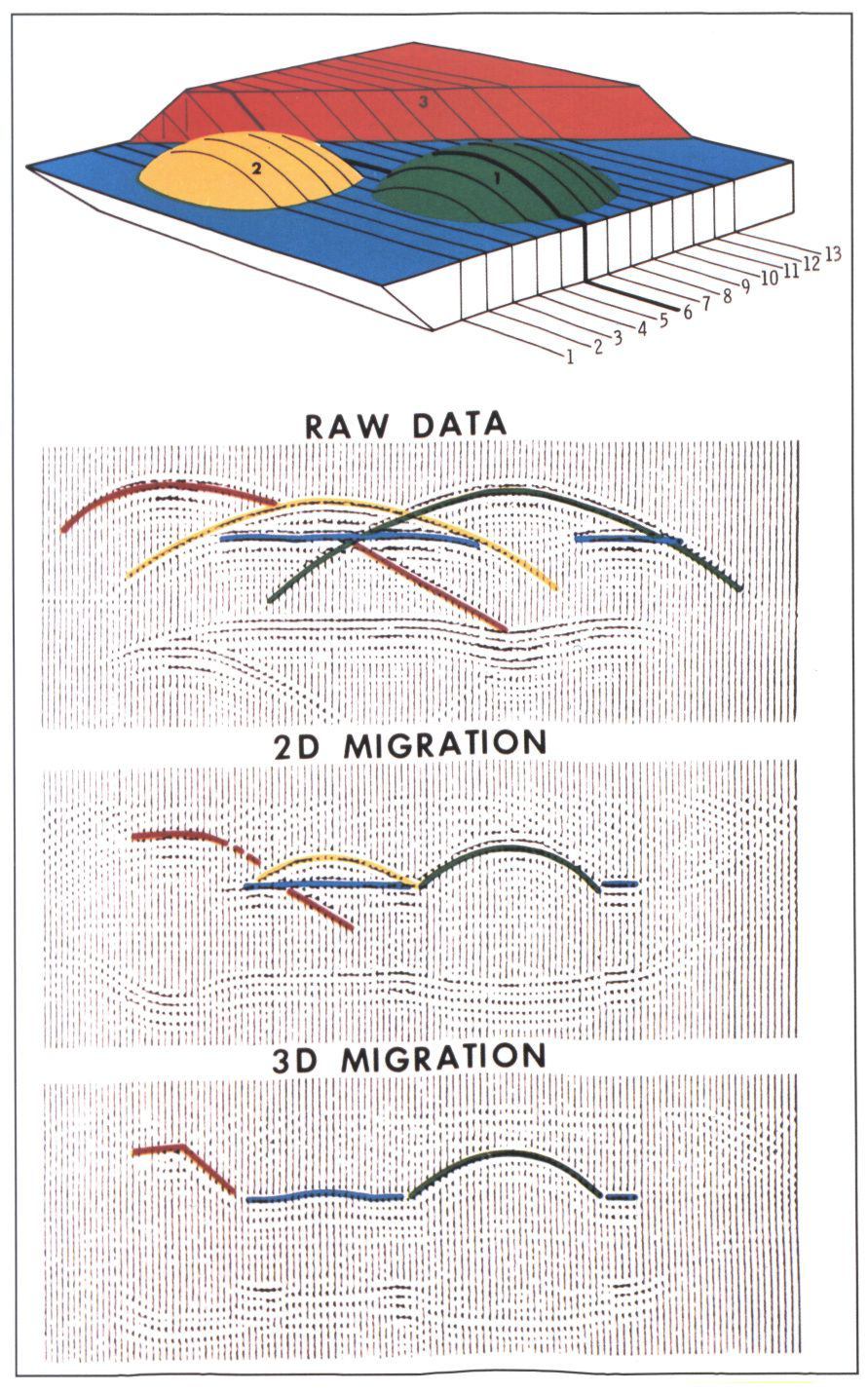
Рис. 7.3. Преимущества 3D сейсморазведки: получение правильной формы
и правильного положения объектов в пространстве
(Brown, A. Interpretation of three-dimensional seismic data, 1999)
Наиболее близкие к реальным формы и положения отражающих границ можно получить лишь при трехмерной миграции сейсмических данных, причем, при миграции до суммирования. Такая операция требует огромного количества времени и памяти компьютера, поэтому выполняется только в больших компьютерах, еще лучше, в суперкомпьютерах.
Преимущества 3D миграции наглядно демонстрируются на модели (рис. 7.3), а на рис. 7.4 мы приводим результаты миграции реальных 3D сейсмических наблюдений.
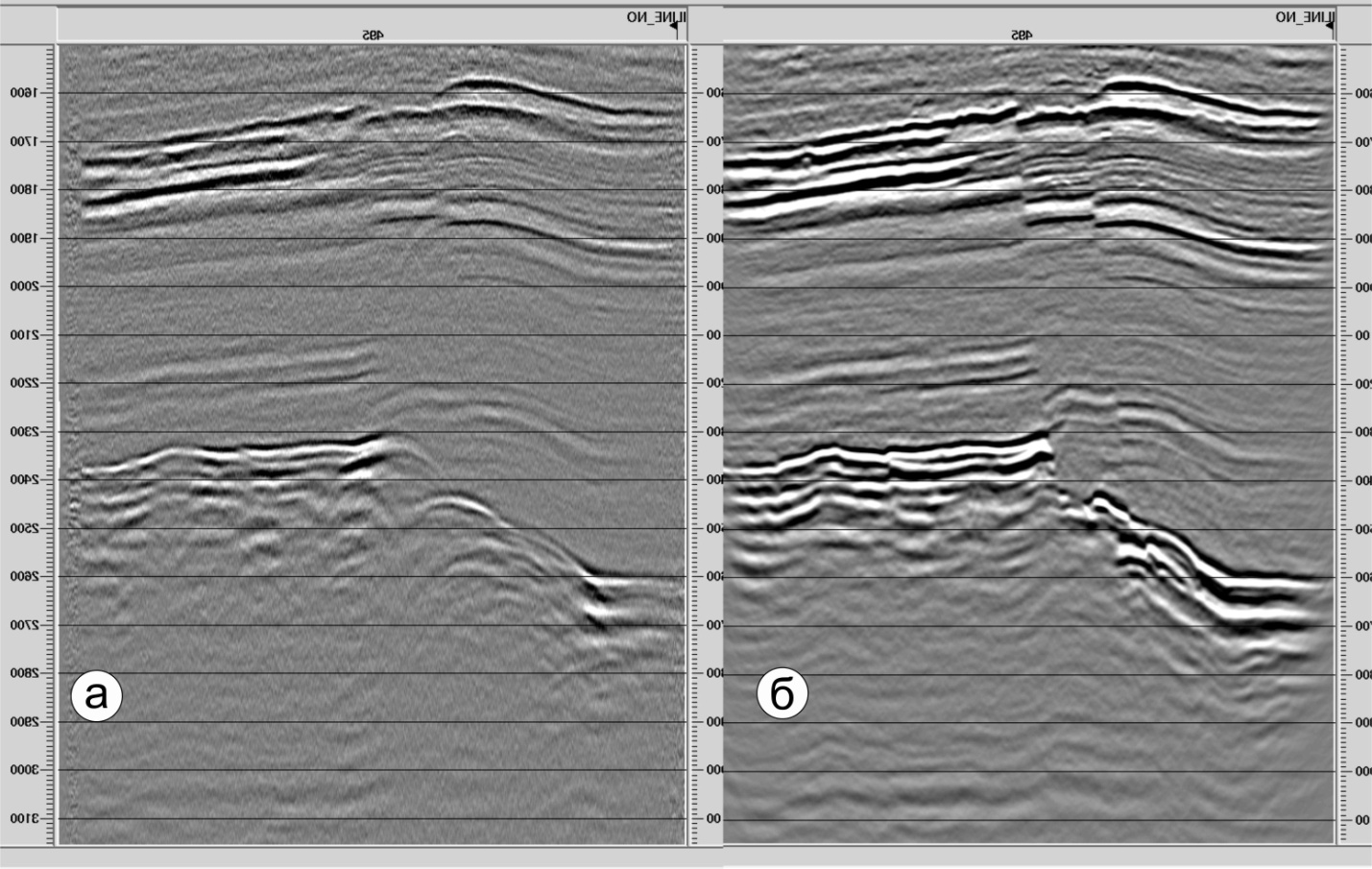
Рис. 7.4. Пример 3D миграции сейсмических данных до суммирования:
а) суммарный разрез по одному из профилей без миграции;
б) суммарный разрез по тому же профилю после 3D
миграции данных до суммирования
В данной задаче рассматривается достаточно простой случай – двухмерная миграция данных одноканального сейсмоакустического профилирования (файл Yalama36.sgy), причем глубина воды существенно больше глубины границ под дном. Поэтому скорость волн для миграции можно брать равной скорости в воде.
В новом проекте в первом потоке (Flow1) ставим первой процедурой SEG-Y Input, в окно File(s) открываем обрабатываемый файл (Yalama36.sgy). Основные параметры записи считываются с файла, сортировку ставим только по номеру сейсмограммы FFID (записи одноканальные).
Эти данные в глубоководной части моря записаны с задержкой, чтобы считать ее величину, активируем Remap header values (рис. 7.5), и указываем там, откуда считать задержку (DELAY, 2I,,109).
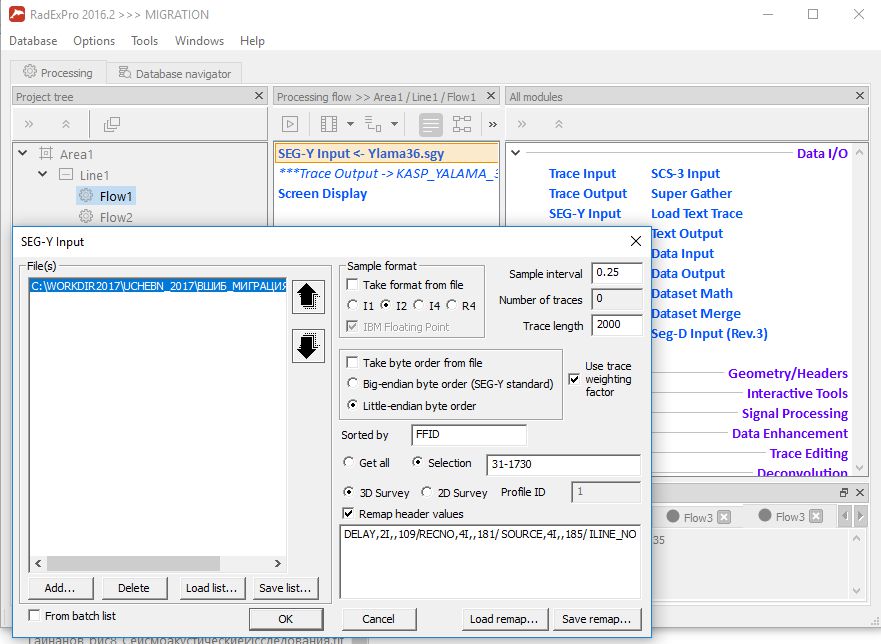
Рис. 7.5. Настройка потока для считывания исходных данных
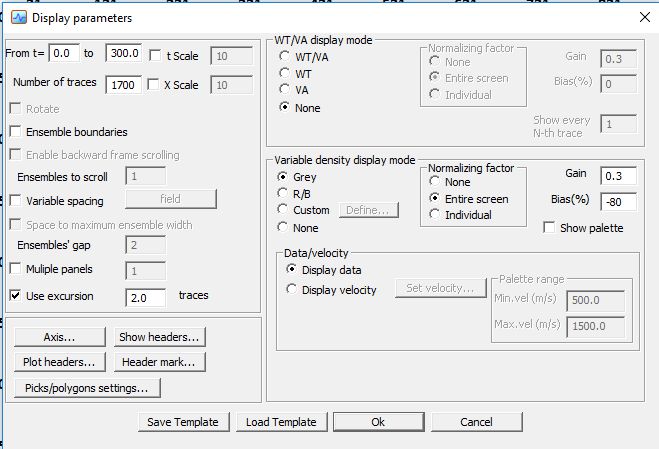
Рис. 7.6. Настройка модуля Screen Display
После процедуры считывания полевых данных с файла Yalama36.sgy ставим процедуру сохранения их в базе данных RadExPro, затем как обычно Screen Display для визуализации данных (образец настройки модуля дан на рис. 7.6).
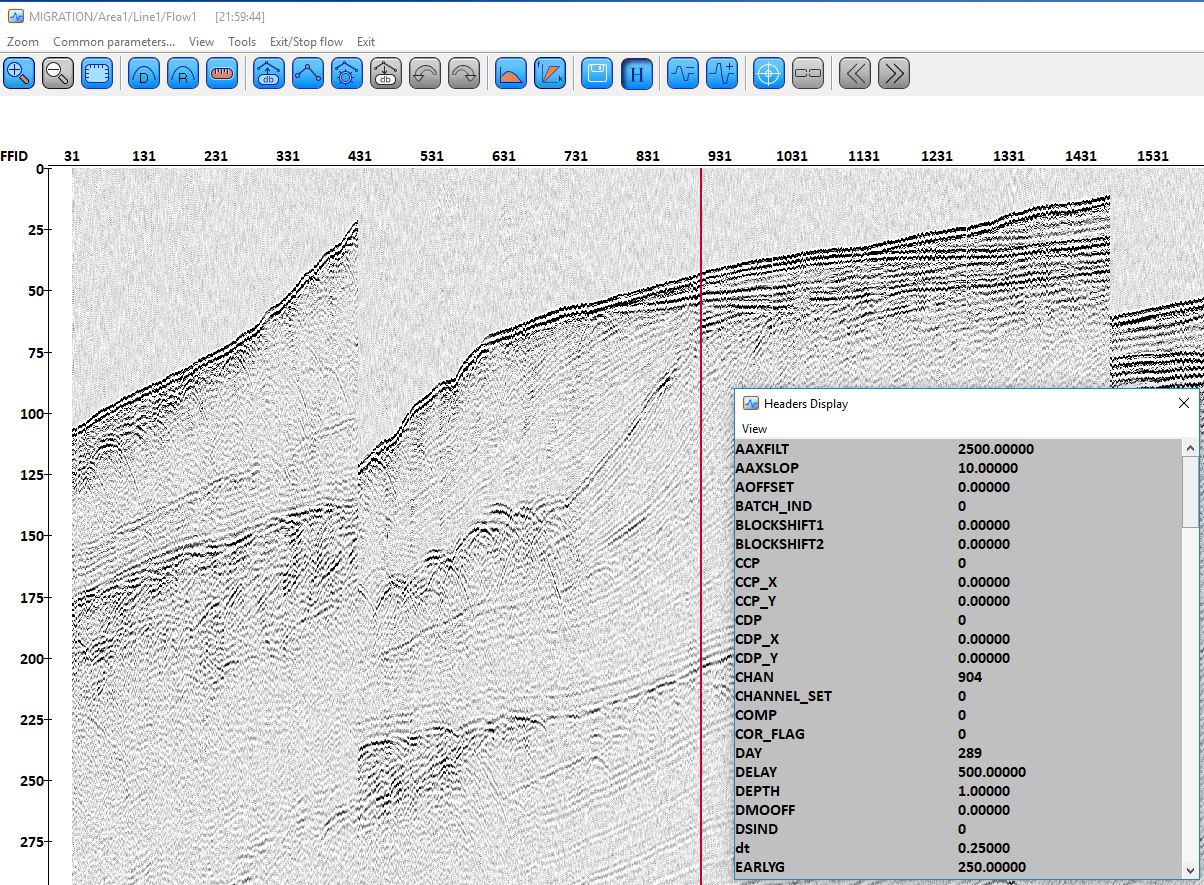
Рис. 7.7. Изображение исходного временного разреза с активированной
опцией Header Display – можно прочитать, что на данной точке
задержка (DELAY) равна 500 ms
Запустив поток, получаем ихображение временного разреза, и активировав опцию Header Display (иконка с «H» в верхней части изображения) можем проверять заполнение заголовков трасс (рис. 7.7). Хотя программа подписала времена с левого края временного разреза начиная с нуля, мы видим по самому разрезу и в окне Header Display, что трассы записаны с задержкой (500 ms на выбранной точке), причем задержки на выбранном интервале профиля менялась 2 раза.
Для правильной работы процедуры миграции необходимо, чтобы сейсмические трассы были записаны, начиная с нулевого времени. Чтобы привести данные к этому условию нам потребуется создать еще один поток обработки данных (Flow2). В данном потоке как обычно ставим первым процедуру считывания данных, на этот раз с базы данных, куда мы их сохранили при выполнении первого потока данного проекта. Порядок считывания трасс такой же, как и в первом потоке. Модуль Screen Display сразу же после ввода данных нужен для того, чтобы убедиться, что мы ввели именно те данные (рис. 7.8). Второй раз в конце потока он изобразит уже отредактированные данные – сейсмические трассы без задержек и увеличенной длины, начинающиеся с нуля времени, поэтому будьте готовы подобрать параметры изображения по новому, чтобы увидеть именно нужное место записи с подходящими параметрами.
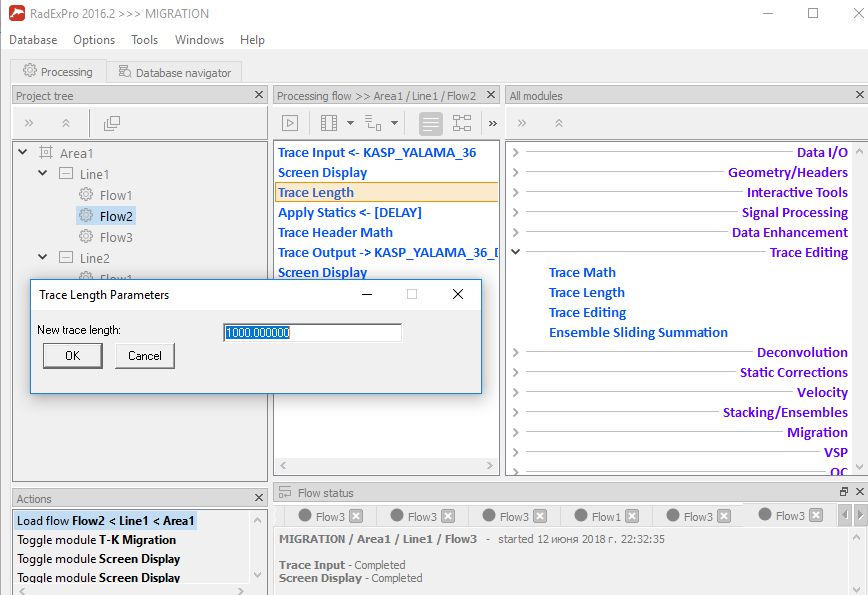
Рис. 7.8. Поток Flow2 для редактирования данных
Следующей процедурой ставим Trace Length, которая удлинит трассы до 1000 мс, так, чтобы записи не пропали, когда мы их сдвинем назад по времени на величину задержки.
Далее ставим процедуру ввода статических поправок, которая как раз сдвинет трассы на величину задержки (DELAY) назад.
Еще одна процедура Trace Header Math обнуляет величины задержек (DELAY), так как мы сделали записи трасс теперь без задержек.
После этого мы сохраняем эти трассы в новую базу данных процедурой Trace Output (рис. 7.8).
Но на этом подготовка трасс к миграции еще не заканчивается. Необходимо присвоить в соответствующие поля заголовков трасс реальные координаты источников и приемников – при выполнении миграции шаг наблюдений, или расстояние между приемниками по профилю должно быть известно, а в большинстве случаев еще это расстояние должно быть одинаковое. Поэтому выполним Присвоение геометрии (Задача № 3), и заполним соответствующие поля заголовков реальными координатами, извлекая их из специальных файлов координат, или переводя уже записанные в заголовки трасс угловые координаты GPS в метровые величины, и вычисляя расстояния между точками наблюдений.
В учебных целях допускается присвоение приблизительных расстояний исходя из средней скорости судна и времени между отдельными возбуждениями волн. В нашем примере такая оценка дала расстояние между точками близкое к 3 м, так что в дальнейшем мы будем считать это расстояние равным 3 м.
Теперь создадим поток Flow3 для выполнения самой операции миграции (рис. 7.9).
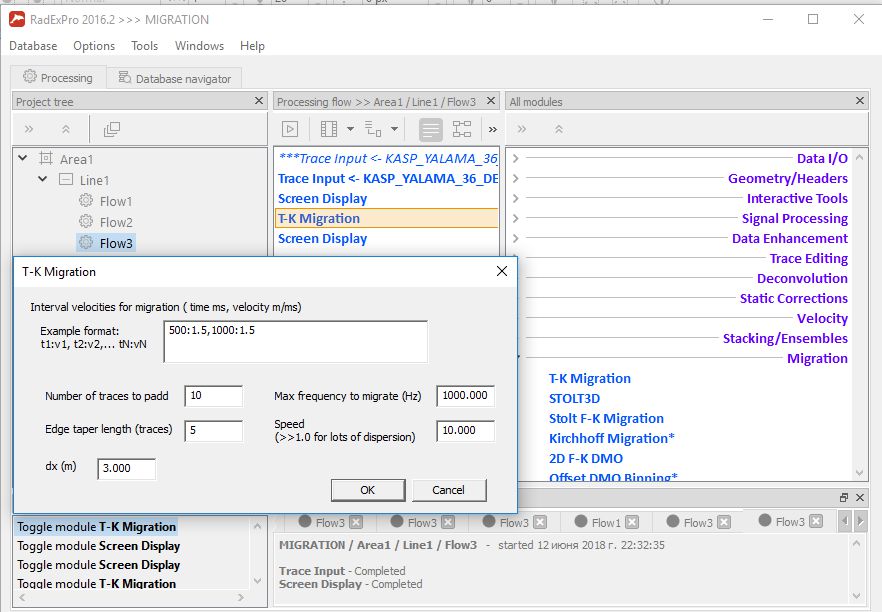
Рис. 7.9. Поток для выполнения миграции.
Во всплывающем окне показан пример задания параметров
Снова первой процедурой ставим считывание трасс с базы данных (подготовленных с нулевой задержкой и с присвоенной геометрией). Затем модуль Screen Display изображает временной разрез до миграции (рис. 7.10). Потом осуществляется миграция процедурой T-K Migration (пример задания ее параметров изображен на всплывающем окне). Результат миграции наблюдаем следующей процедурой Screen Display, параметры которой следует задавать такими же, как в предыдущем случае, чтобы сравнить разрезы до и после миграции (рис. 7.11).
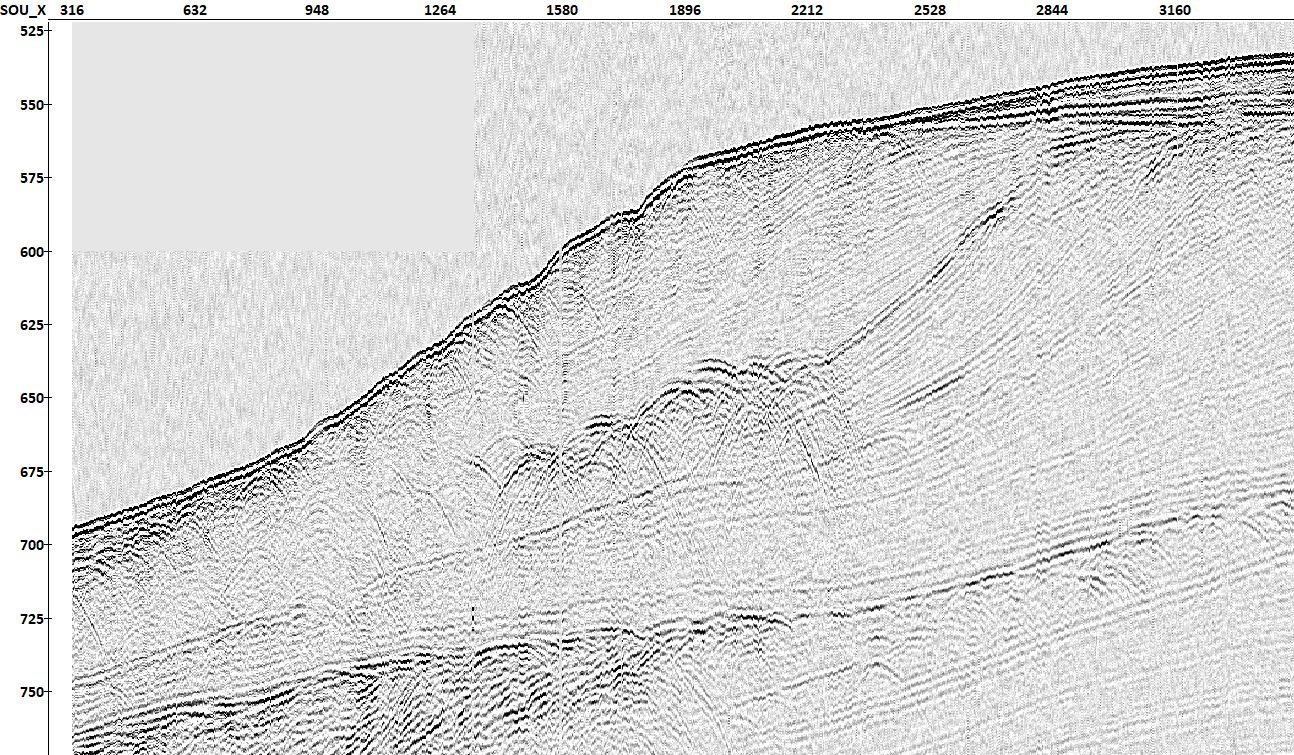
Рис. 7.10. Сейсмический временной разрез до миграции
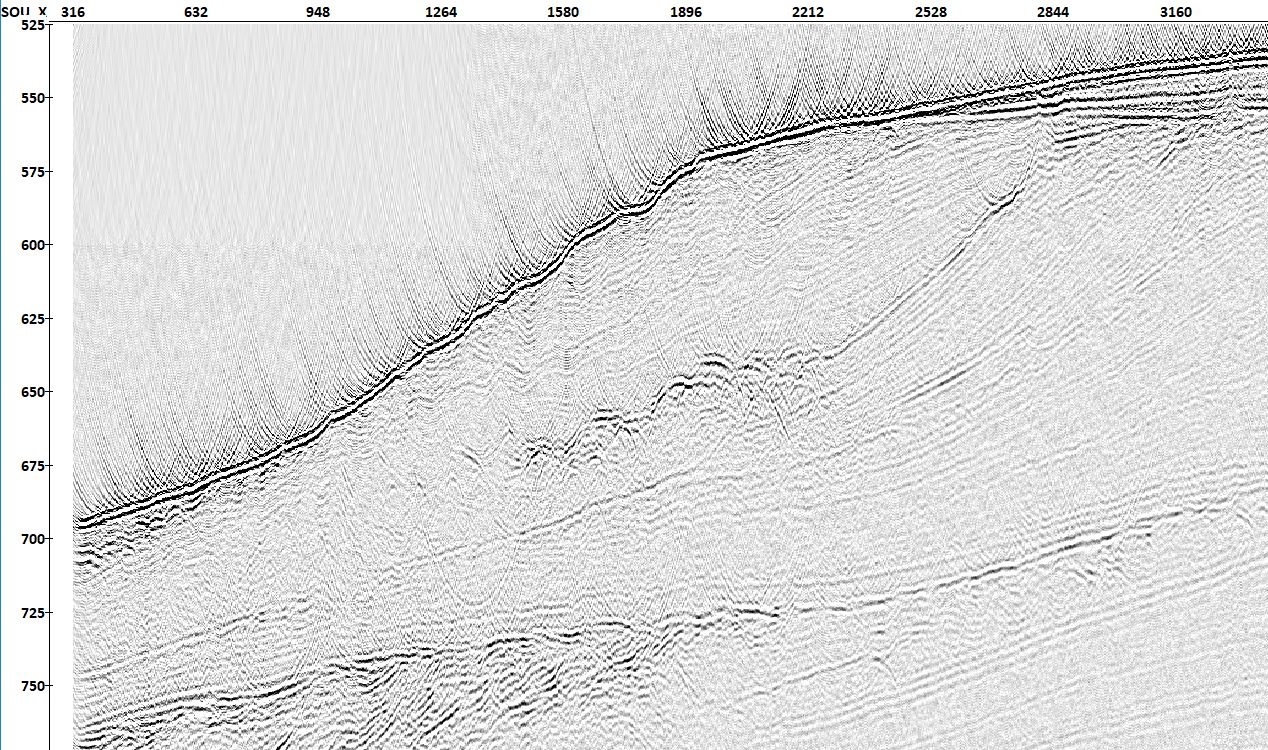
Рис. 7.11. Тот же сейсмический временной разрез после миграции
В результате миграции исчезли направленные вниз гиперболические оси синфазности («усы» дифракции), отражающие границы стали более похожи на реальные геологические границы. Множество направленных вверх гиперболических осей синфазности от дна появилось после миграции вследствие большого разброса асплитуд отражений от дна. Они хорошо видны, так как амплитуды отраженных волн от дна здесь многократно превышают амплитуды всех других отражений.
Что получится, если скорости заданы неправильно? К примеру, попробуем в параметрах миграции задать завышенные значения скорости – зададим интервальную скорость, равной 2.2 км/с.
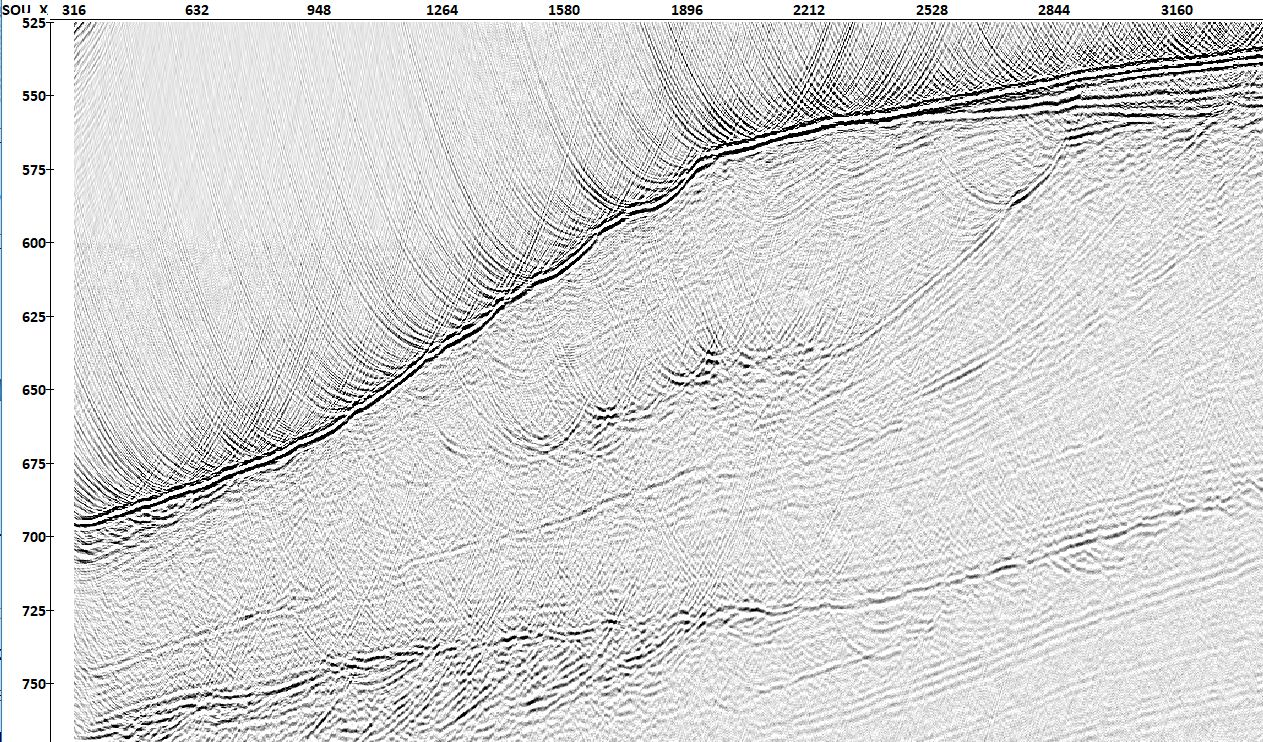
Рис. 7.12. Тот же сейсмический временной разрез после миграции
при задании завышенного значения скорости (2.2 км/с)
Мы видим, что прерывистая граница посередине изображения разреза теперь не собралась в сплошную кривую (рис. 7.12), появилось множество гипербол, направленных вверх. Так что, очевидно, что такая скорость для миграции этих данных не подходит. Хотя это было ясно и так – подавляющая часть разреза представлена морской водой, где скорость не может быть 2.2 км/с.
Теперь попробуем задать явно заниженное значение скорости – 1.0 км/с. Снова видим явно неудачный результат – многие направленные вниз гиперболы так и остались не сфокусированными в точки, граница посередине картины не собралась в сплошную кривую (рис. 7.13).
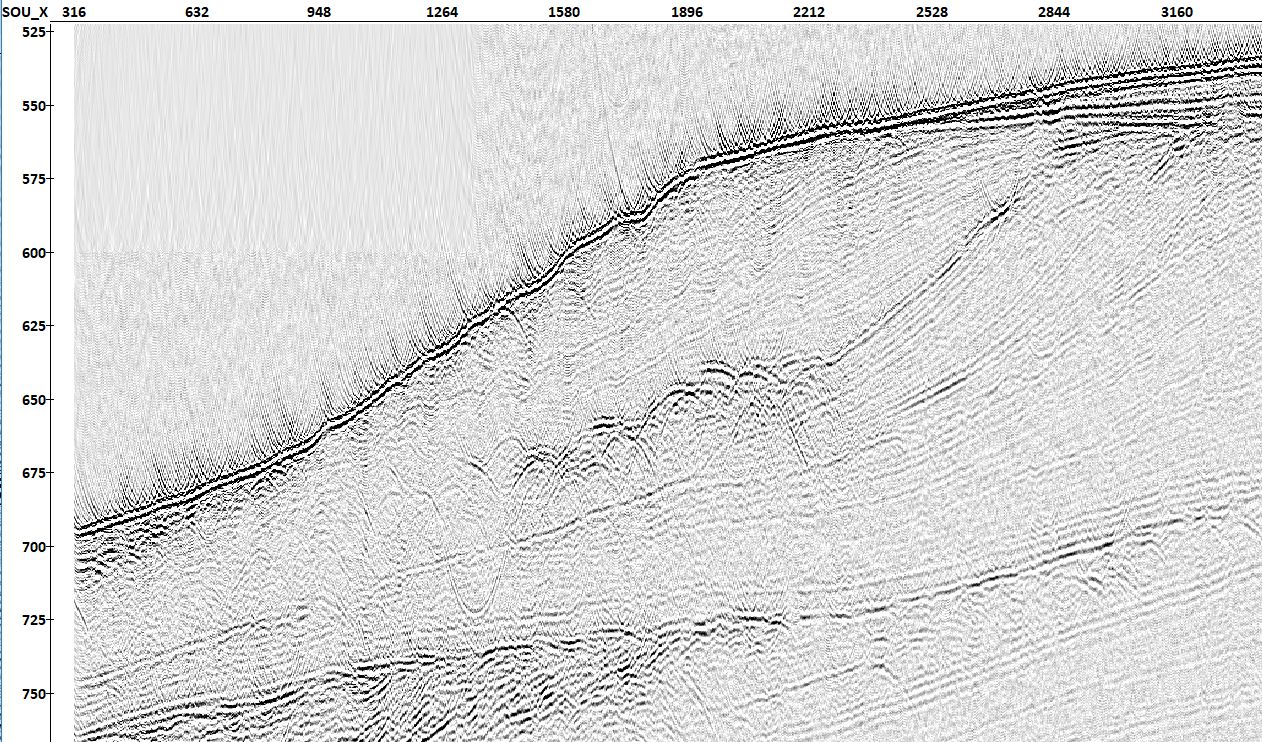
Рис. 7.13. Мигрированный разрез при заниженном значении скорости –
многие направленные вниз гиперболы так и остались не сфокусированными в точки,
граница посередине картины не собралась в сплошную кривую
Этот простейший пример миграции сейсмических данных, возможно, не совсем убедительно демонстрирует преимущества миграции, но он позволяет обучающимся самостоятельно попробовать работу миграции на реальных данных и в реальном времени.