

Основные принципы МОГТ
Современная сейсморазведка МОВ проводится по способу многократных перекрытий, или по методу общей глубинной точки (МОГТ), т.е. отражения от каждой точки изучаемой границы регистрируются многократно и потом суммируются, тем самым целевые отражения усиливаются, а помехи подавляются. Для этого используются специальные системы наблюдений (Боганик Г.Н., Гурвич И.И., 2006, Гайнанов В.Г., 2006).
Система наблюдений – это расположение источников и приемников относительно друг друга и относительно исследуемого объекта.
Изображать систему наблюдений с помощью лучей и годографов волн (рис.6) бывает недостаточно удобно, в особенности, когда наблюдения производятся с многократным перекрытием. Принято изображать системы наблюдений на обобщенной плоскости, где положения пунктов возбуждения (ПВ) и пунктов приема (ПП) для каждого отдельного наблюдения отображаются вполне однозначно (рис. 4.1).
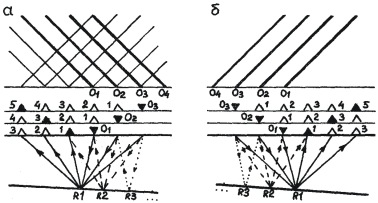
Рис. 4.1. К объяснению изображения системы наблюдений на обобщенной плоскости:
a) стоянки двигаются слева направо; b) стоянки двигаются справа налево
Горизонтальная линия на обобщенной плоскости – это линия профиля, где расположены ПВ и ПП, пикеты которых обозначены в определенной последовательности. Через каждый пикет проходят вспомогательные линии под углом +450 и -450 , образуя сетку. Для того, чтобы показать, на каком интервале профиля расположены ПП (интервал наблюдений) при возбуждении на каком-либо определенном ПВ, на вспомогательной линии, исходящей от этого ПВ под углом 450 , зачерняют тот интервал, на который проецируется линиями под углом -450 интервал расположения ПП.
Изображение на обобщенной плоскости не только однозначно определяет положение ПВ и ПП на профиле, но в случае многократных перекрытий позволяет легко формировать сейсмограммы общего пункта возбуждения (ОПВ), общего пункта приема (ОПП), общих удалений (ОУ), общей глубинной (ОГТ) или общей средней (ОСТ) точки (рис. 4.2).
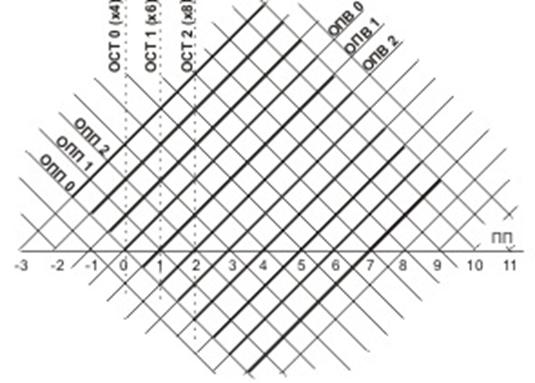
Рис. 4.2. Изображение системы наблюдений с многократными перекрытиями (ОГТ)
на обобщенной плоскости
Системы наблюдений в МОГТ
В МОГТ необходимо зарегистрировать отраженные волны от каждой точки границы при различных расстояниях источник-приемник. Делать это над каждой точкой, постепенно удаляя в разные стороны источник и приемник, нецелесообразно. На практике поступают следующим образом (рис. 4.1):
Пусть R1 – начальная точка прослеживания границы на профиле, При первом возбуждении источник (О1) и приемную косу (каналы 1,2, 3,...) располагают так, что середина расстояния между источником и первым каналом косы находится над точкой R1. После каждого возбуждения источник и приемную косу сдвигают вперед на расстояние, равное шагу наблюдений. При втором возбуждении (О2) отражение от точки R1 запишет канал 3, канал 1 запишет отражение от следующей точки границы – R2. При третьем возбуждении (О3) отражение от R1 запишет канал 5, от R2 – канал 3, от R3 – канал 1, и т. д. Таким образом, при каждом возбуждении на сейсмограмму записываются трассы по числу каналов станции, соответствующие разным глубинным точкам. Сортировка трасс ОГТ на сейсмограммах из разных пунктов возбуждения и их суммирование с вводом кинематических поправок производится при обработке данных на ЭВМ.
При обработке данных МОГТ, часто возникает необходимость суммировать сейсмические трассы, собранные в группы (ансамбли) по определенному признаку: по общей глубинной точке – ОГТ, общему пункту возбуждения – ОПВ и т.д. (рис. 4.3).
Рис. 4.3. Принципы сортировки (группирования) трасс по различным признакам
в сейсморазведке (по Хаттон Л., 1989)
Для того, чтобы в последующем можно было делать такие сортировки трасс, в системе RadExPro создается база сейсмических данных, в которой каждой сейсмической трассе присваиваются уникальные параметры: номер трассы (сквозной по базе), номер трассы в сейсмограмме, номер точки возбуждения, координаты точки приема и т.д. Эти параметры записываются в заголовок (этикетку или паспорт) трассы. Поскольку, в основном, они относятся к геометрическому положению источника и приемника на местности, эта процедура называется присвоением геометрии.
Расположение источников и приемников относительно изучаемого объекта на местности называется системой наблюдений. В сейсморазведке принято системы наблюдений изображать графически на обобщенной плоскости (рис. 4.2).
Таким образом, можно сказать, что присвоение геометрии – это ввод параметров системы наблюдений в обрабатывающую программу.
Главной целью обработки данных МОГТ является получение временного разреза ОГТ, на котором целевые отражающие горизонты прослеживаются наилучшим образом, помехи подавлены или существенно ослаблены. Определяются также скорости в покрывающей толще, а в некоторых случаях оценивается и распределение коэффициентов отражения и поглощения.
Последовательность процедур обработки называется граф обработки (см. раздел Обработка многоканальных сейсмических данных в начале книги). В данной задаче мы рассмотрим минимальный граф обработки – последовательность обязательных процедур, без которых невозможно получить временной разреза ОГТ:
1. Ввод полевых данных и сохранение их в базе данных системы – были сделаны в задаче № 1.
2. Предварительная обработка данных (фильтрация, регулировка амплитуд) – была сделана в задаче № 2.
3. Присвоение геометрии и сортировка трасс по ОГТ (бинирование) – сделано в задаче № 3.
4. Теперь мы попробуем ввести априорные (т.е. взятые интуитивно, или из других источников) кинематические поправки и осуществить суммирование трасс по ОГТ.
Для этого создаем поток для суммирования трасс по способу ОГТ (ОСТ) (рис. 4.4). Снова это можем сделать путем дублирования предыдущего потока, и назовем его 30 CDP Stack. В процедуре Trace Input указываем ввод сохраненного с предобработкой файла (L02_Preproc), выбираем ввод с сортировкой по CDP и CHAN. Screen Display оставляем с параметрами предыдущего потока. Далее вставляем процедуру NMO/NMI для ввода кинематических поправок, и для начала устанавливаем там скорость в воде, т. е. мы собираемся синфазно суммировать волну, распространяющуюся в воде – отражение от дна.
После кинематических поправок вставляем копию Screen Display, чтобы посмотреть, как будут выглядеть сейсмограммы с поправками. Потом вставляем процедуру Ensemble Stack, которая просуммирует трассы сейсмограмм ОГТ, и в конце еще один Screen Display, чтобы увидеть просуммированный временной разрез.
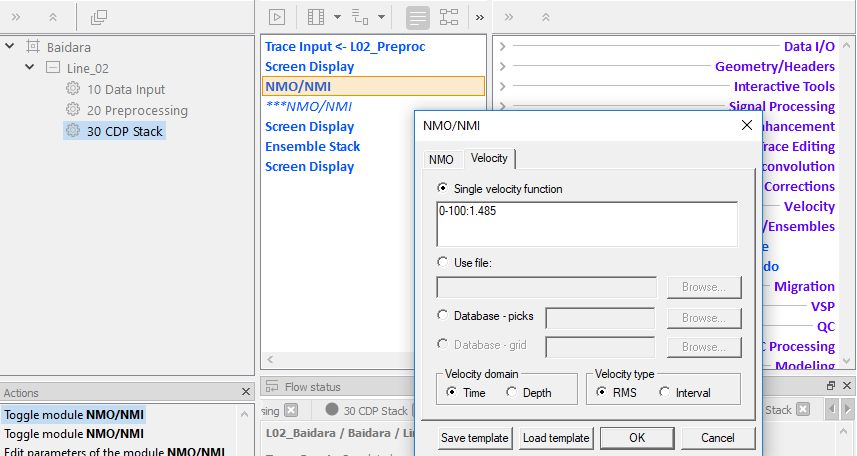
Рис. 4.4. Поток для суммирования по ОГТ. Процедура NMO/NMI служит
для введения кинематических поправок – для расчета поправок установлена
скорость в воде V=1.485 m/ms
Запустив поток, сначала получим изображение исходных сейсмограмм (рис. 4.5), где прямая волна характеризуется прямолинейной осью синфазности, а отраженные – гиперболами разной кривизны.
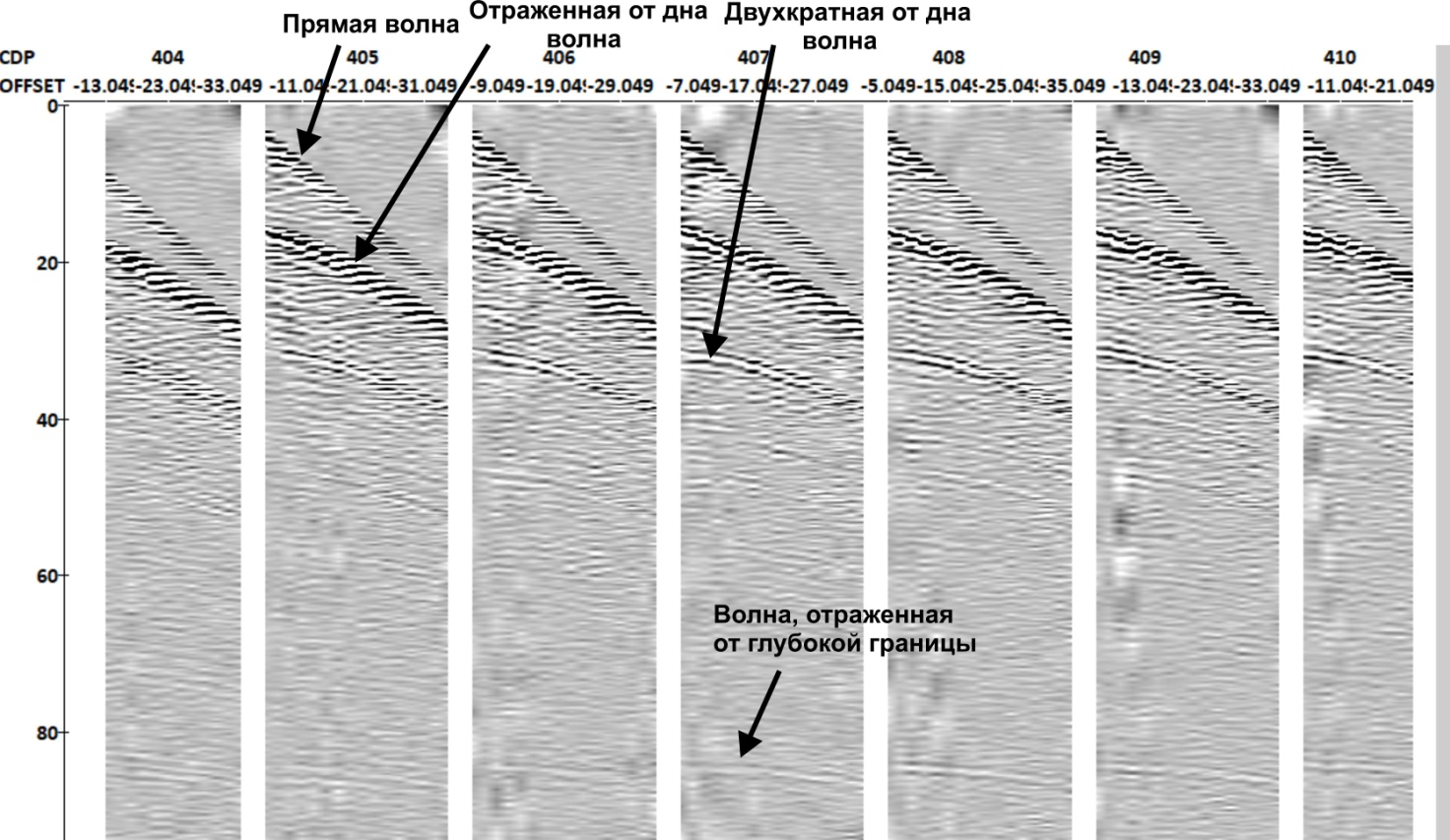
Рис. 4.5. Исходные сейсмограммы ОГТ
Продолжая работу потока (кнопка Exit), получим изображения сейсмограмм уже после введения кинематических поправок (рис. 4.6).
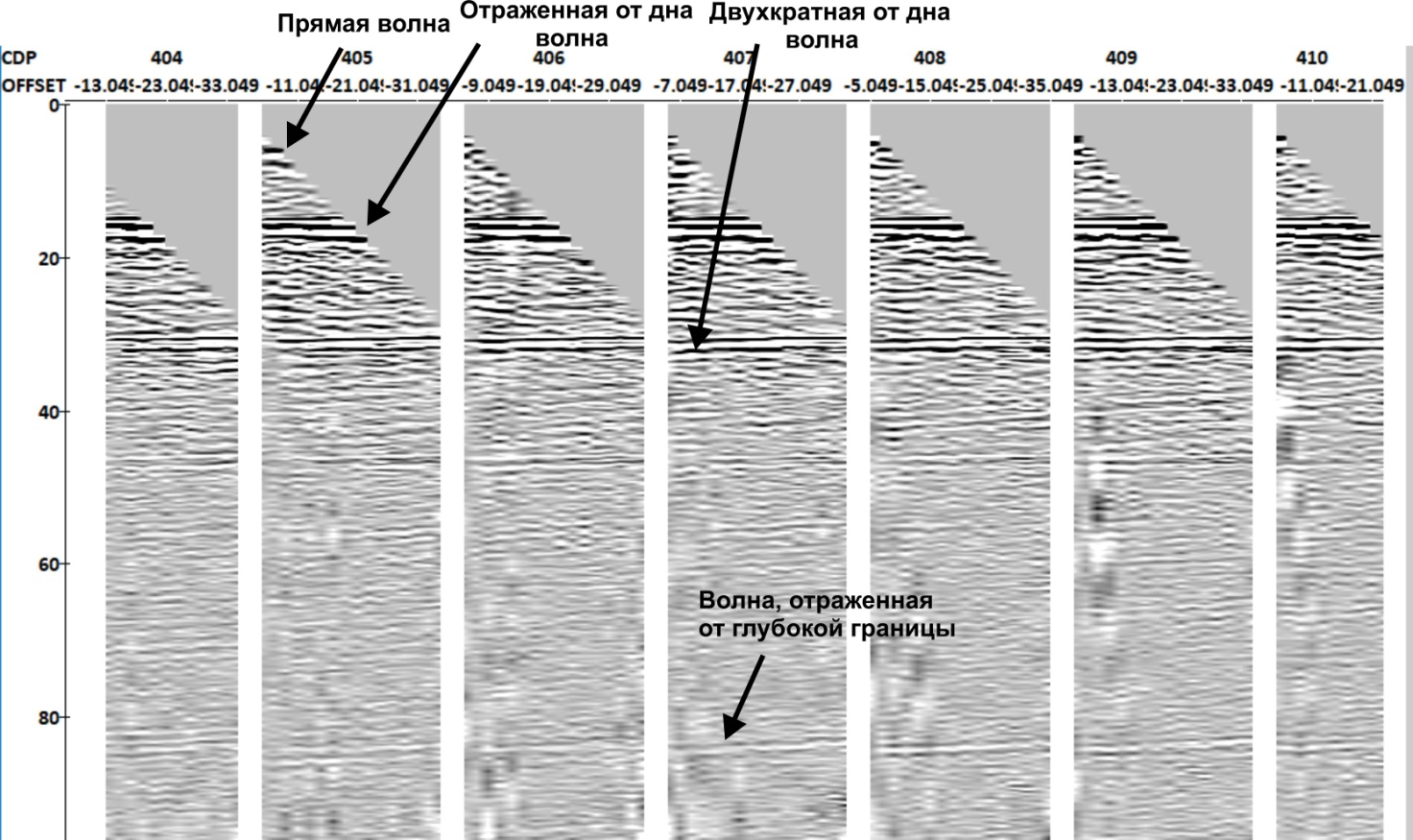
Рис. 4.6. Сейсмограммы ОГТ после введения кинематических поправок
со скоростью в воде
После введения поправок оси синфазности однократной и многократных волн от дна стали горизонтальными, следовательно, они будут усиливаться при суммировании, а оси синфазности отражений от глубоких границ переспрямились, и они при суммировании будут только ослабляться.
Снова продолжая работу потока, запускаем суммирование трасс, и получаем суммарный временной разрез (рис. 4.7).
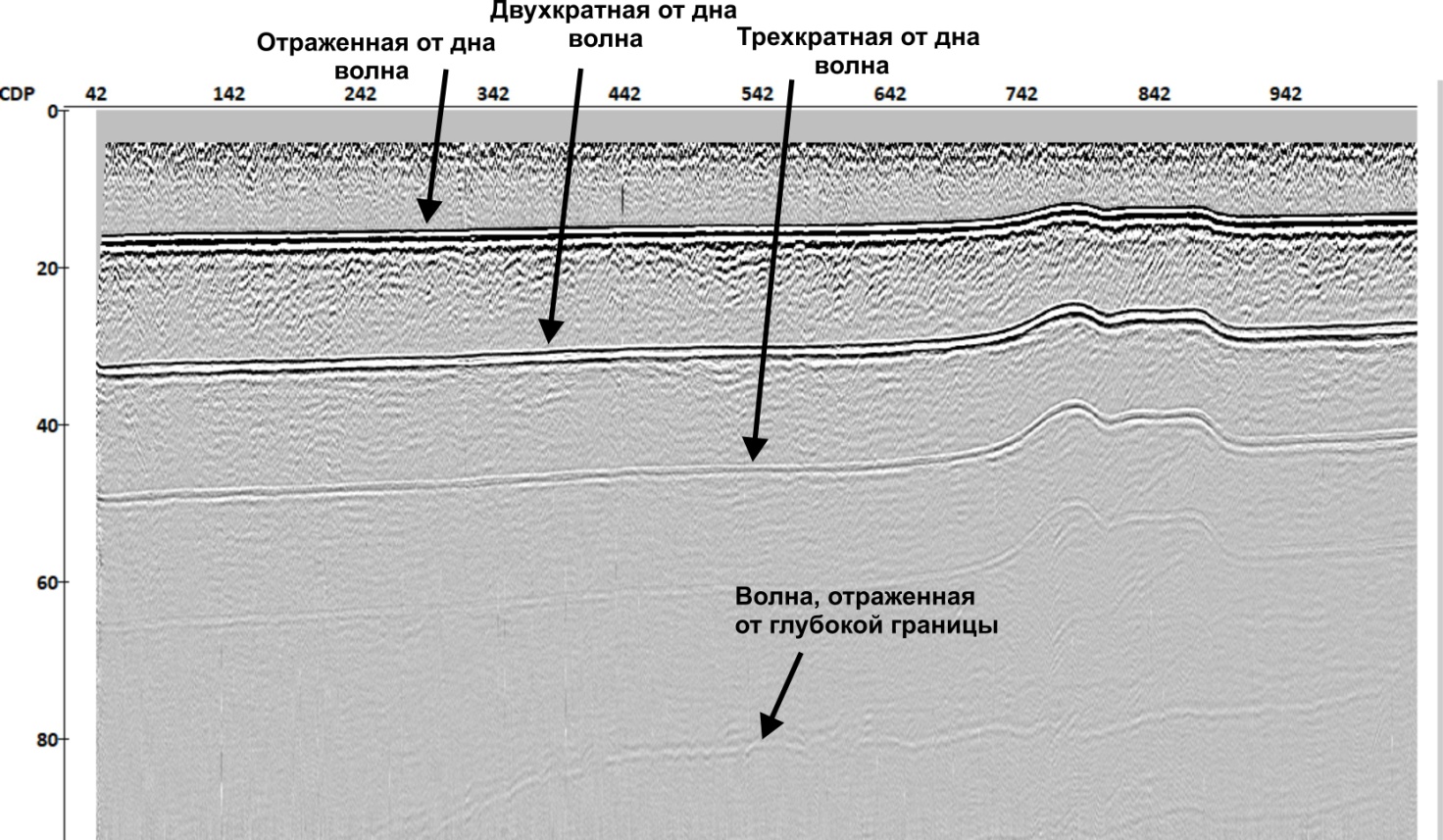
Рис. 4.7. Суммарный временной разрез ОГТ с кинематическими поправками
для отражений от дна
На суммарном разрезе по сравнению с однократным разрезом (рис. 4.5), резко упал уровень помех, отражение от дна прекрасно прослеживается, но усилились также и многократные волны от дна, а отражение от глубокой границы, наоборот, стало слабее. Результат был ожидаем, так как при расчете кинематических поправок мы использовали скорость сейсмических волн в воде, т.е. спрямляли именно оси синфазности распространяющихся в воде отраженных волн.
Для того, чтобы спрямить оси синфазности отражений от глубоких границ, в меню процедуры NMO/NMI вставим значение скорости, близкое к средней скорости в покрывающей толще для этих границ (V=1.8 m/ms), и снова запустим поток. После ввода кинематических поправок теперь получаем несколько иной вид сейсмограмм (рис. 4.8).
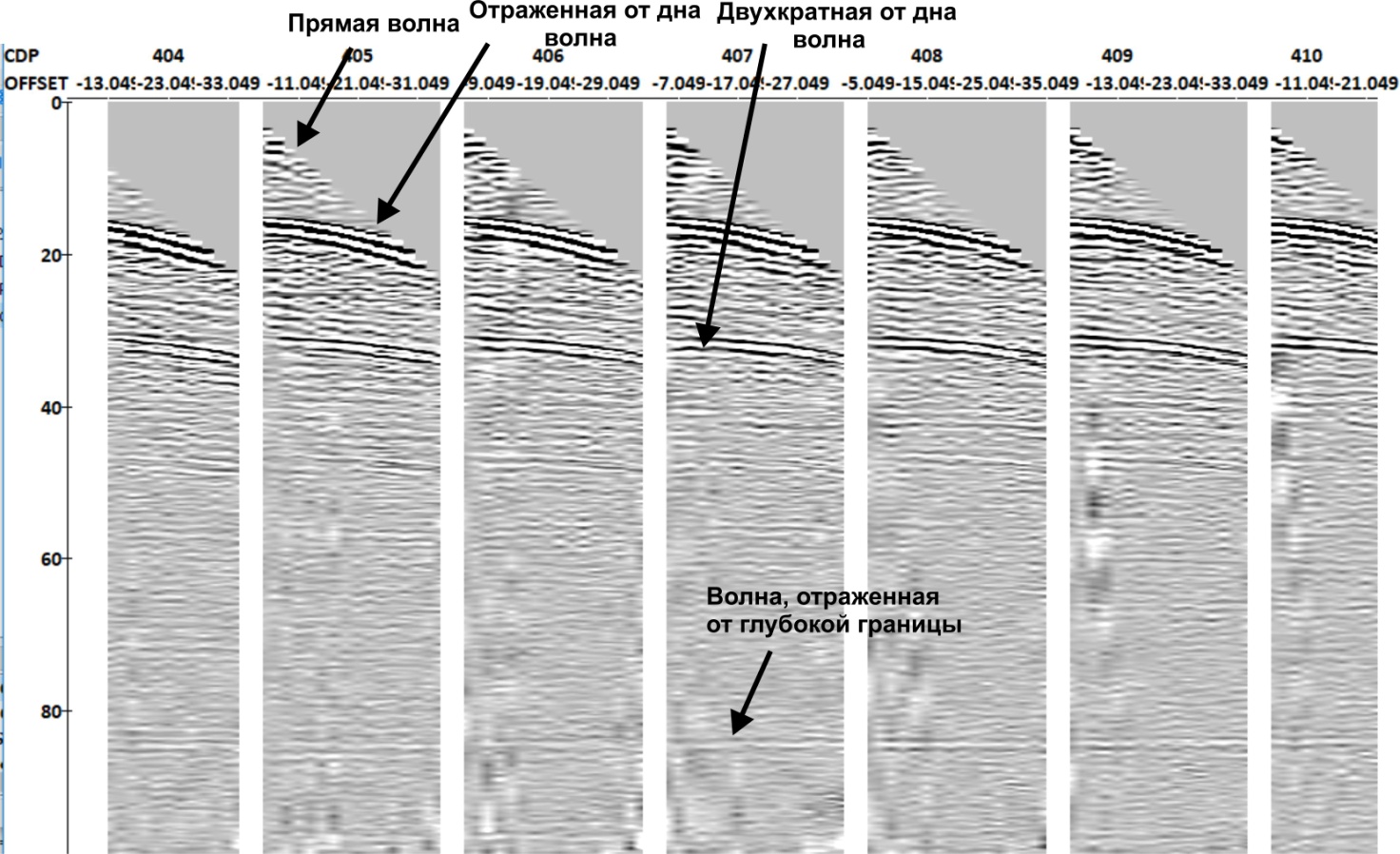
Рис. 4.8. Сейсмограммы ОГТ после введения кинематических поправок со скоростью
для глубоких границ (V=1.8 m/ms)
Теперь оси синфазности глубоких отражений стали почти строго горизонтальными, значит они при суммировании будут усиливаться, а оси синфазности однократной и многократных отражений от дна остались все еще криволинейными, следовательно при суммировании эти волны должны ослабляться.
Запустив поток дальше, получаем этому подтверждение – волна, отраженная от глубокой границы неплохо усилилась, а многократные волны от дна заметно ослабились (рис. 4.9). Правда, испортилась форма волны, однократно отраженной от дна, которая является полезной границей. Задачей суммирования по ОГТ является усиление всех однократных отражений, и ослабление многократных. Поэтому кинематические поправки надо вводить с переменным скоростным законом, чтобы оси синфазности однократных волн на всех временах спрямлялись.
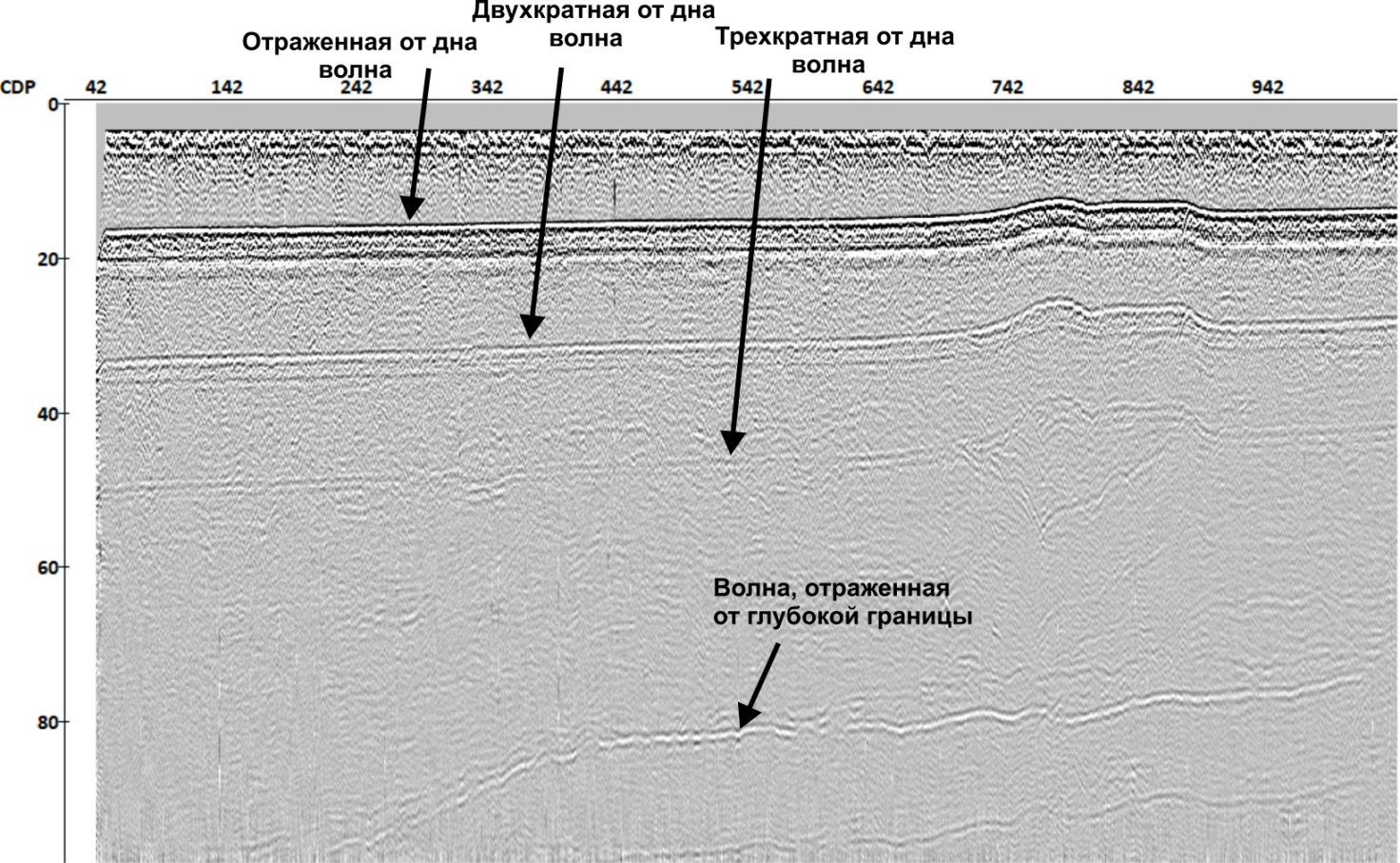
Рис. 4.9. Суммарный временной разрез, полученный с кинематическими поправками
со скоростью для глубоких границ
Существует несколько способов определения скоростного закона, но наилучший, это использование модуля интерактивного скоростного анализа, с которым мы познакомимся в задаче № 5.
Пока попробуем применить самый простой и старый способ, а именно, запуская поток с разными значениями скоростей в процедуре NMO/NMI, можно оценить, насколько заданные значения скорости соответствуют действительным значениям для определенных времен вступления волн (или границ на временном разрезе) по получающимся временным разрезам ОГТ.
Рекомендуется также сначала задать в процедуре Trace Input только одно значение offset, например -5.25 (первый канал), и, запустив поток, получить временной разрез только по одному каналу, затем его сравнивать с получающимися суммарными разрезами.
После того, как будет подобран более или менее соответствующий скоростной закон, необходимо в процедуре NMO/NMI задать этот закон, например как на рис. 4.10, и получить окончательный временной разрез с этим законом.
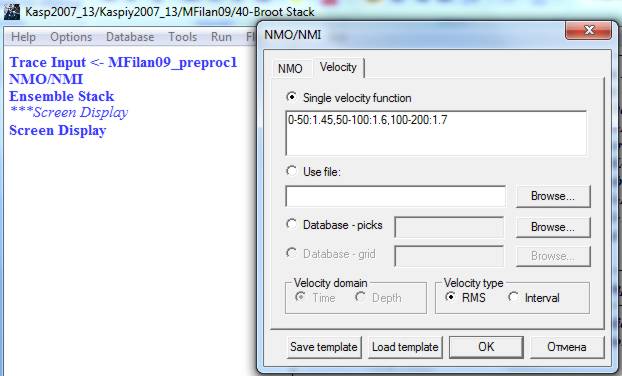
Рис.4.10. Пример задания изменяющегося по времени скоростного закона
в процедуре NMO/NMI
Полученный разрез можно не только наблюдать на экране, но можно и сохранить в базе данных (процедурой Trace Output), или в файл для последующей обработки или интерпретации в других системах. Для этого вставьте в поток процедуру SEG-Y Output (см. Приложение 4).