

Для обработки одноканальных данных разработаны специальные программы, которые достаточно просты, но вполне эффективны в борьбе с часто встречающимися помехами (Гайнанов, 2009).
Самым первым назначением таких программ является чтение цифровых записей сейсмоакустических данных и изображение их на экране компьютера в удобном для визуального анализа виде. Для этого программа должна позволять выбирать вертикальные и горизонтальные масштабы временного разреза в необходимых пределах, обеспечивать выбор коэффициента усиления выводимого на экран сигнала (рис. 4).
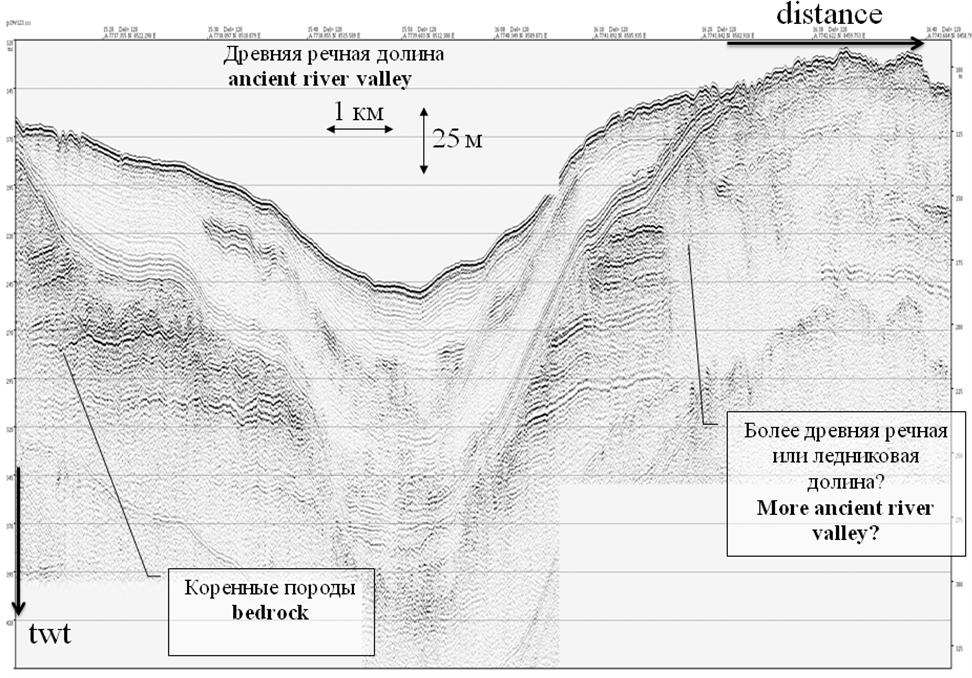
Рис. 4. Еще один сейсмический временной разрез после цифровой обработки
В комплекс обрабатывающих процедур входят различные частотные фильтры и регуляторы усиления. Электрические фильтры высоких и низких частот и регуляторы усиления применялись еще и в аналоговой регистрирующей аппаратуре, но с появлением цифровой регистрации и обработки данных это стало возможным осуществлять гораздо более эффективно (рис. 5).
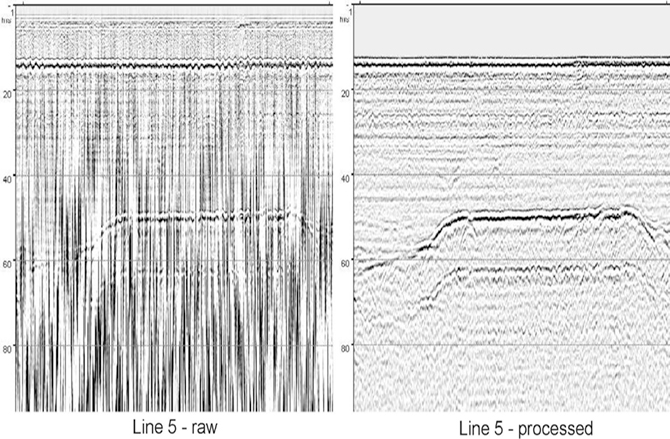
Рис.5. Пример частотной фильтрации и коррекции статических поправок
Более сложные процедуры, такие как подавление высокоамплитудных помех, исключение влияния волнения (“Swell Filter”) требуют интерактивной работы с программой, поэтому остановимся на них подробнее.
Анализ данных, полученных в самых разных условиях волнения моря, показывает, что как в точке возбуждения, так и в точке приема, волнение оказывает 3 вида воздействия на сигнал:
- время прихода отраженных волн постоянно меняется в связи с изменением высоты приемника или источника над отражающей границей;
- амплитуда принимаемых волн меняется в связи с изменением глубины источника и приемника, а также кривизны поверхности воды – сильной отражающей границы;
- по этим же причинам меняется форма и, соответственно, частотный состав принимаемого сигнала.
Полное исключение влияния волнения на сейсмоакустические данные означает корректировку всех вышеуказанных искажений сигнала. При этом мы исходим из предположения, что в течение записи трассы влияние этих факторов на все принимаемые сигналы (однократно отраженные волны) не меняется. Кроме того, считаем, что сигналы по соседним трассам должны быть коррелированны, т.е. резкие изменения времени вступления, амплитуды и формы сигнала вызваны исключительно влиянием волнения.
Основной алгоритм предусматривает прослеживание первых вступлений отраженной от дна волны по всему обрабатываемому интервалу профиля, высокочастотную фильтрацию прослеженной линии, и сдвиг трасс на оставшиеся после фильтрации значения времен (рис. 6).
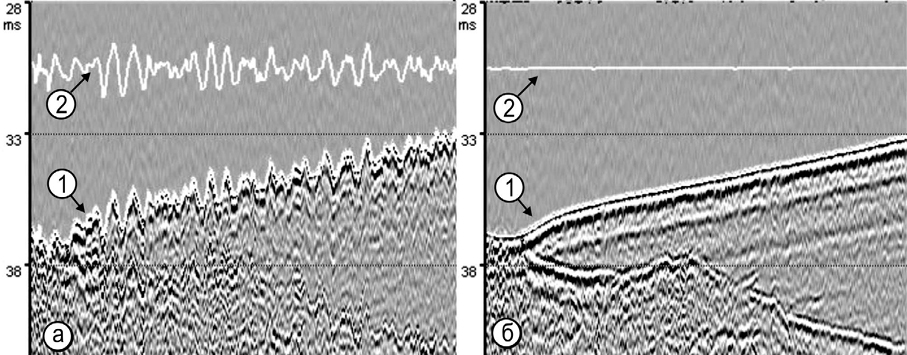
Рис. 6. Иллюстрация работы основного алгоритма процедуры исключения влияния
волнения моря: a – фрагмент полевого временного разреза с изображением
прослеженной линии дна (1) и высокочастотной составляющей этой линии (2);
б – тот же фрагмент после исключения влияния волнения
Но так как часто волнение вызывает сильные флуктуации амплитуд сигнала и повышение уровня шума на записи, то непосредственное прослеживание первых вступлений донной волны по исходной записи часто не удается. Поэтому нами предусмотрены специальные процедуры предварительной обработки данных и разработан алгоритм прослеживания донной волны повышенной помехоустойчивости, один из примеров работы которого представлен на рис. 7.
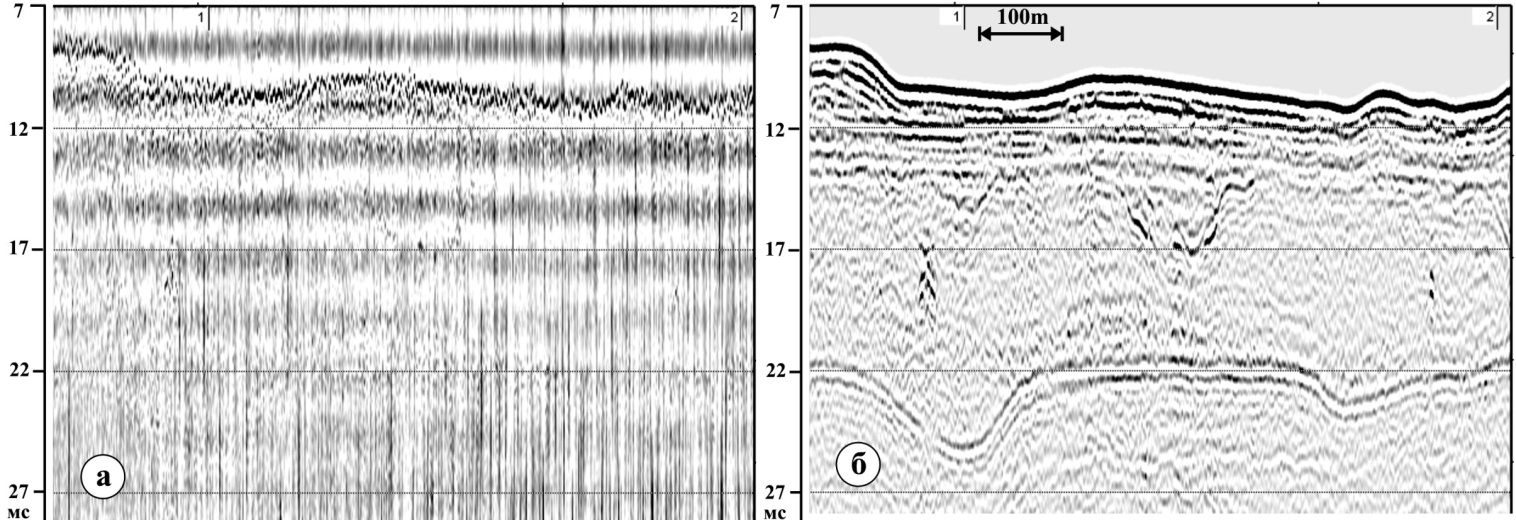
Рис. 7. Пример обработки сейсмоакустических данных, полученных при волнении моря
около 3 баллов: a – полевой временной разрез; б – временной разрез после
исключения влияния волнения. Источник – бумер
Имеются также процедуры подавление многократных волн в слое воды, которые в некоторых случаях дают вполне впечатляющие результаты (рис. 8).
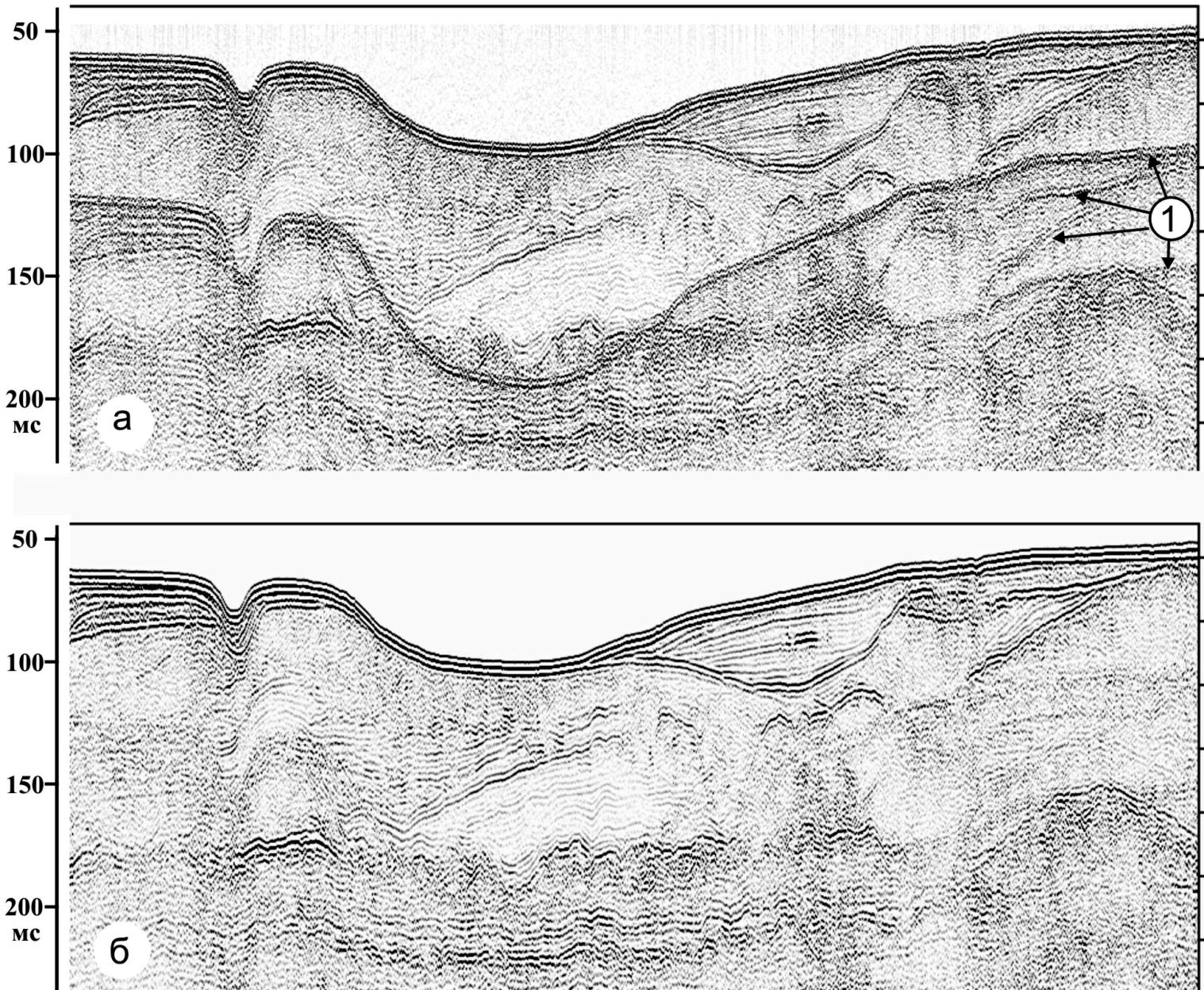
Рис. 8. Подавление кратных волн: а − фрагмент временного разреза до обработки (спаркер 600 Дж, Карское море); б – тот же фрагмент после сглаживания влияния волнения и подавления кратных волн по нашему алгоритму. 1– кратные и неполнократные волны