

УДК 528.004
Резюме – В работе представлено сравнение алгоритмов, предназначенных для моделирования поверхности лесного покрова по материалам воздушного лазерного сканирования. Основное внимание уделено алгоритму с применением молдинга и алгоритму Pit-Free. Приведены особенности моделирования лесного покрова, выявлены преимущества алгоритма Pit-Free перед алгоритмом с применением молдинга при создании поверхности высот древостоя. Помимо этого изучена достоверность выделения границ лесных и безлесных участков по модели, построенной алгоритмом Pit-Free. Данный способ создания поверхности лесного покрова может стать основой для исследований, затрагивающих использование данных ВЛС в лесном хозяйстве, а также для создания тематических карт.
Ключевые слова – воздушное лазерное сканирование, облако точек, моделирование, лесной покров, высота деревьев, ЦМР, ЦММ, молдинг, Pit-Free, граница леса, геоинформационное картографирование.
FOREST CANOPY GIS MODELING BASED ON AIRBORNE
LASER SCANNING DATA
Kalinovskiy L. V., Novakovskiy B. A.
Abstract – The paper describes a comparison of algorithms intended for modeling of the forest canopy based on airborne laser scanning (ALS) data. Most attention has been concentrated on the molding-based algorithm and Pit-Free algorithm. The features of forest canopy modeling are presented int the article. The advantages of the algorithm using the molding in front of the algorithm Pit-free during creation of the height surface of the tree stand are revealed. In addition, the features of the selection of forest and treeless area borders based on the models constructed by algorithm Pit-Free have been studied. This method of creating a forest canopy can be applied in studies that consider the use of ALS data in forestry, and also to thematic mapping.
Keywords – airborne laser scanning, point cloud, modeling, forest canopy, height of trees, DSM, DTM, molding, Pit-Free, forest boundary, GIS mapping.
Воздушное лазерное сканирование (ВЛС) относится к числу современных технологий, которые открывают новые возможности в исследовании различных природных и антропогенных объектов и процессов. На сегодняшний день ВЛС используют в качестве основного средства получения исходных данных в самых разных направлениях деятельности: от инженерно-геодезических изысканий, проектирования и мониторинга объектов горнодобывающей отрасли и инфраструктуры линейных объектов (железные и автомобильные дороги, трубопроводы, линии электропередач), до ландшафтного дизайна и городского планирования.
Среди природных объектов наибольшую популярность данный вид дистанционного зондирования Земли приобрел при изучении лесов. ВЛС позволяет получать сведения не только о рельефе, покрытом лесной растительностью, но и о самом лесном покрове. Это способствует активному использованию данной технологии в лесном хозяйстве при инвентаризации и лесной таксации, что уже достаточно давно и активно практикуется, например, в странах Скандинавского полуострова.
При исследовании лесов средствами ВЛС важную роль играет моделирование поверхности древостоя и определение его высоты. Существует множество способов создания таких моделей, и каждый год появляются новые методики изучения лесного покрова. Среди всего многообразия важно выбрать оптимальную методику, соответствующую конкретным задачам проекта или научного исследования. Критериями оптимальности в настоящей работе стали наименьшие временные затраты и минимальное участие пользователя при условии создания качественной модели, наиболее достоверно описывающей лесной покров.
Работа выполнена на примере данных ВЛС, предоставленных ООО «Геопроектизыскания». Облако точек отображает территорию, расположенную в Томской области. Высота полета носителя сканирующей системы — 2500 м над уровнем моря. Средняя плотность точек составляет 2 точки/м2, на перекрытиях соседних линий полета самолета плотность достигает 5 точек/м2. Лазерная съемка сопровождалась аэрофотосъемкой в видимом диапазоне, с помощью которой были получены снимки с пространственным разрешением 30 см. Обработка точек лазерного сканирования (ТЛО) осуществлялась в программном обеспечении (ПО) Bentley MicroStation с надстройкой TerraSolid и в ПО ArcGIS.
Существует несколько способов построения поверхности лесного покрова, среди которых можно выделить следующие:
1. Поиск и регистрация максимального значения высоты точек лазерных отражений в каждом пикселе растра определенного пространственного разрешения.
2. Предварительная фильтрация лазерных отражений класса «Высокая растительность». Фильтрация основана на анализе точек, принадлежащих окружности определенного радиуса или регулярной сетки с определенным размером ячеек, в пределах которой остается только точка с наибольшим значением высоты. На основе отфильтрованных точек происходит построение триангуляционной модели.
3. Построение триангуляционной модели по точкам, выделенным с помощью алгоритма молдинга, который применяется к «перевернутому» облаку точек [1].
4. Алгоритм Pit-Free [3] суть которого заключается в создании триангуляционных моделей отдельных слоев облака точек. Построенные модели накладываются друг на друга с сохранением в местах их перекрытия максимальных значений высот.
В результате создается растровая модель без резких провалов значений в соседних ячейках, которые характерны для многих других методов построения поверхности лесного покрова (рис. 1).
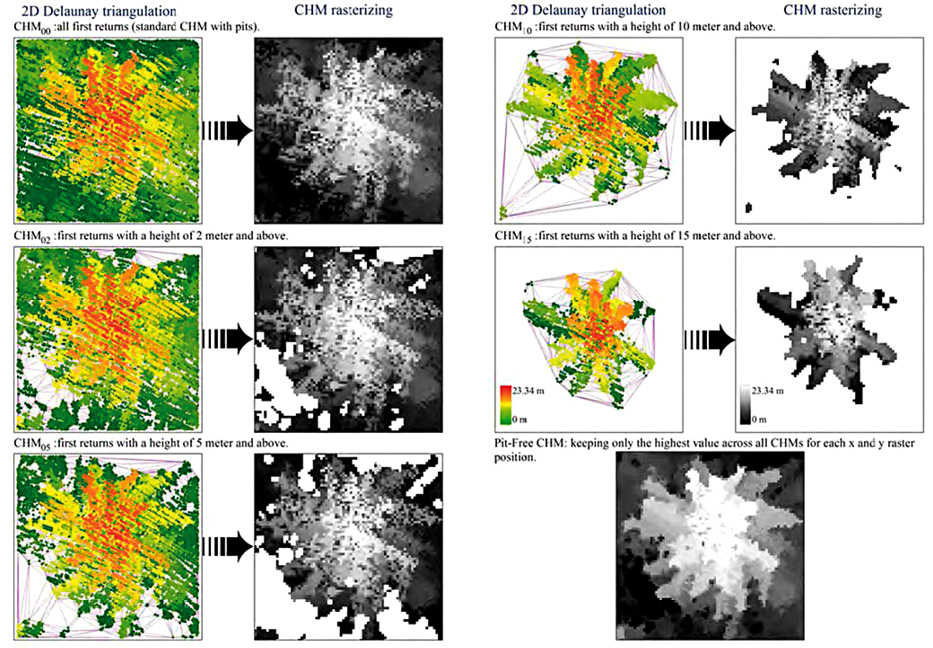
Рис. 1. Визуализация поэтапного построения модели дерева алгоритмом Pit-Free [3]
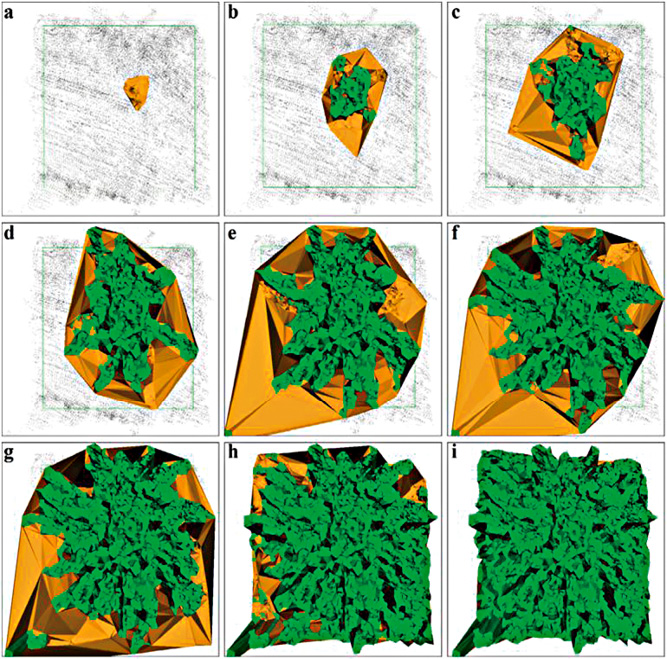
Рис. 2. Визуализация построения модели дерева алгоритмом Spike-Free [4]
5 . Алгоритм Spike-Free [2] основан на построении триангуляции Делоне, которая начинается от ТЛО с наибольшей высотой и продолжается по направлению уменьшения высоты. Создание модели происходит с учетом двух параметров, один из которых определяет максимальную длину ребра триангуляции, а другой — размер вертикальной зоны, в пределах которой происходит поиск новых точек, подходящих под первый параметр. В результате пользователь получает триангуляционную модель, описывающую поверхность лесного покрова (рис. 2). Использование алгоритма Spike-Free на данный момент осуществляется только на коммерческой основе [5].
Для создания моделей высот лесного покрова опробованы два метода, один из которых основан на трансформировании облака точек и последующем применении молдинга, а другой базируется на алгоритме Pit-Free.
Обработка ТЛО началась с выделения класса «земли». В модуле TerraScan надстройки TerraSolid это выполняется методом молдинга. После выделения отражений, принадлежащих земной поверхности, проведена проверка выполненной классификации. Она осуществляется с целью исключения ошибочно отобранных точек.
Далее выполнено создание моделей поверхности лесного покрова с применением молдинга. После необходимых подготовительных операций, которые включали классификацию ТЛО по относительной высоте над земной поверхностью, выделение первичных отражений и трансформацию облака точек, проведено выделение вершин крон деревьев. Перед запуском инструмента, по аналогии с выделением точек класса «земля», необходимо задать параметры IterationAngle (итерационный угол) и IterationDistance (итерационное расстояние). В результате опробовано несколько вариантов значений итерационного угла (от 10° до 50°) и итерационного расстояния (от 1 м до 8 м). Фрагменты изображений, полученных при разных показателях, можно увидеть на рис. 3 а, 3 б, 3 в. Помимо вышеназванных параметров, опробованы различные значения максимальной длины ребра триангуляции, которая влияет на количество прогалин при моделировании поверхности лесного покрова, не изменяя количество классифицируемых точек.
Анализируя полученные изображения, можно сделать вывод, что данные параметры очень сильно влияют на итоговый результат. При уменьшении итерационного угла уменьшается количество выделяемых инструментом молдинга точек, так как большим препятствием для него становятся резкие перепады относительных высот, характерные для лесного покрова. Увеличение итерационного расстояния приводит к увеличению числа отражений, отнесенных к классу поверхности лесного покрова, но данное изменение менее значительно, чем при увеличении итерационного угла. Таким образом, выделение поверхности лесного покрова на основе молдинга нельзя назвать оптимальным, так как параметры необходимо подбирать в отдельности для каждого случая, параллельно сравнивая полученные результаты с аэрофотоснимками. Но при правильном подборе параметров, данный метод позволяет получить модель поверхности лесного покрова близкую к достоверной.
Следующим этапом работы проведена апробация другого способа выделения поверхности лесного покрова, основанного на алгоритме Pit-Free. Согласно данному алгоритму, на первом этапе значения высот всех отражений пересчитываются относительно высот ЦМР. Это необходимо для устранения влияния склонов при последующем моделировании поверхности лесного покрова [4]. Затем выполняют прореживание точек путем фильтрации, основанной на анализе окружностей заданного радиуса, в пределах которых остается только лазерное отражение с наибольшим значением высоты.
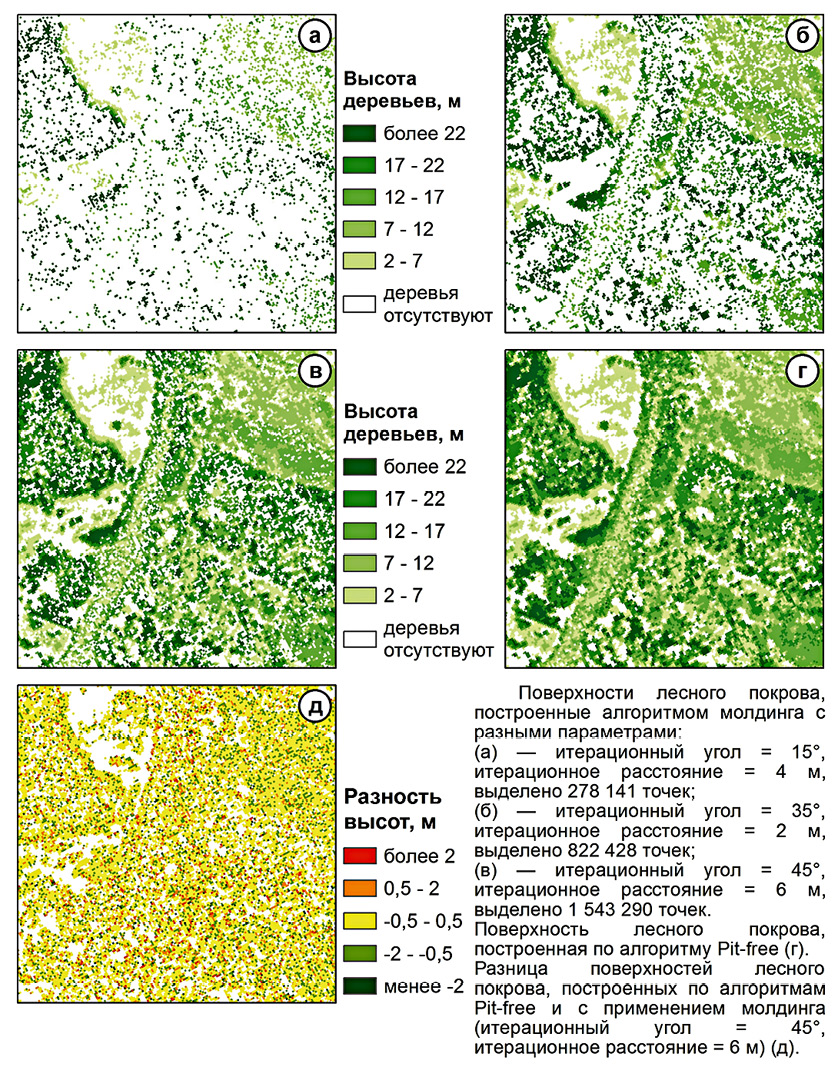
Рис. 3. Сравнение фрагментов изображений, полученных в результате работы
алгоритма с применением молдинга и алгоритма Pit-Free
После фильтрации начинается создание триангуляционных моделей высот, которые рассчитываются для нескольких слоев. В данном случае, нижняя граница каждого следующего слоя находилась на 1,5 метра выше предыдущего. Такая градация обусловлена желанием изучить возможности создания точных моделей поверхности лесного покрова. Верхняя граница оставалась неизменной и подразумевала собой вершины крон деревьев. В процессе создания поверхностей использован параметр, исключающий ребра триангуляции, длина которых более 4 м, так же как и во время построения модели методом молдинга.
Полученные поверхности были экспортированы в растровый формат для последующего слияния в единое изображение поверхности лесного покрова. При наложении двух моделей в перекрывающихся ячейках фиксируется максимальное значение, наблюдаемое среди этих моделей. Таким образом, в результате слияния растров, была получена модель поверхности лесного покрова (рис. 3 г).
Сравнивая изображения, полученные разными методами (рис. 3 в, 3 г), можно отметить, что при одинаковой максимальной длине ребра триангуляции, картина лесного покрова целостнее выглядит при использовании метода Pit-Free. Также к преимуществам данного метода относится меньшая зависимость от параметров, вводимых пользователем. Точно определив максимальную длину ребра триангуляции, которая зависит от плотности точек, поверхность лесного покрова будет выглядеть максимально правдоподобно.
Между поверхностями высот древостоя, полученными двумя отличными друг от друга способами, существует заметная разница (рис. 3 д). В основном, значения высот этих моделей различаются в пределах 1–2 метров. Но в некоторых местах отличия значений пикселей составляют 3 и более метров при средней высоте деревьев равной 14 м и максимальных значениях, достигающих 32 м. Преимущественно эти участки являются склонами эрозионных форм, что говорит о влиянии рельефа на работу алгоритмов. Метод, основанный на применении молдинга, не подразумевал предварительной нормализации облака точек, поэтому и возникла такая разница в значениях высот в отдельных местах.
Помимо определения высоты лесного покрова, полученную данным алгоритмом модель можно использовать для определения прогалин в лесном покрове. Полученный в результате обработки в ПО ArcGIS с помощью инструментов Reclassify и Raster to Polygon векторный слой позволяет дешифрировать участки, в пределах которых отсутствуют деревья (рис. 4, 5). По приведенным ниже иллюстрациям можно увидеть, что точность выделения прогалин достаточно высока.
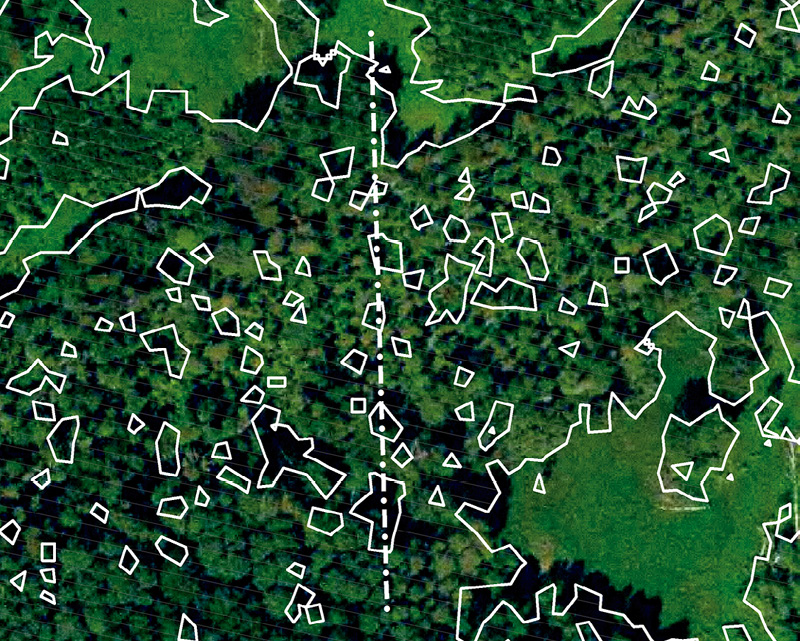
Рис. 4. Аэрофотоснимок с выделенными лесными (белая обводка) и безлесными территориями
по модели, построенной на основе алгоритма Pit-Free.
Белая штрихпунктирная линия характеризует профиль, изображенный на рис. 5
Рис. 5. Профиль леса, обозначенный штрихпунктирной линией на рис. 4
(серый цвет — класс «земля», белый цвет — класс «растительности»)
Но стоит отметить несколько фактов. Во-первых, по такому аэрофотоснимку достаточно сложно с высокой точностью определить достоверность определения прогалин, к которым отнесено большое количество полигонов с маленькой площадью, расположенных среди леса. Такие участки вполне могут образоваться из-за ошибочного определения пользователем значения максимальной длины ребра триангуляции или радиуса окружности при прореживании точек, либо из-за параметров сканирования, например, когда большинство отражений зарегистрировано с ближней стороны кроны деревьев по отношению к сканирующему устройству. Во-вторых, нет полной уверенности в том, что выделенные в качестве лесного покрова полигоны малой площади, расположенные на открытых местах, действительно относятся к деревьям, а не к кустарниковым зарослям. В связи с этим возникает необходимость уточнения объектов, попадающих под определение лесного покрова. Это может быть вся лесная растительности, либо только верхний ярус лесов, либо все древесные виды, в том числе и подлесок с подростом.
В результате выполенных исследований выявлено, что построение модели высот лесного покрова предпочтительнее производить с использованием алгоритма Pit-Free. В сравнении со способом, в котором используется метод молдинга, алгоритм Pit-Free менее требователен к входным параметрам. Кроме того, полученная модель достаточно наглядно описывает поверхность лесного покрова и исключает появление резких скачков в значениях соседних ячеек.
Вычитание поверхностей, полученных двумя разными методами, показало, что отличия в некоторых местах между ними может быть существенными (до нескольких метров). Это говорит не только о необходимости обязательного контроля создаваемых моделей, но также о влиянии на их точность других факторов, таких как рельеф.
В работе показано, что на основе составляемых моделей можно с высокой степенью достоверности определять границы лесных участков и прогалины в пределах лесов. Однако сочетание технологии ВЛС с другими средствами ДЗЗ позволит получить результаты более высокого качества.
Алгоритм Pit-Free может служить отправной точкой для последующих исследований в области использования данных лазерно-локационной аэросъемки в лесном хозяйстве. Полученная таким способом поверхность высот древостоя представляет собой качественную основу для создания карты высоты лесного покрова и других характеристик леса, а также для прочих географических исследований.
[1] Новаковский Б. А., Ковач Н. С., Энтин А. Л., Калиновский Л. В. Геоинформационное картографирование лесного покрова по материалам воздушного лазерного сканирования // Геоинформатика/Geoinformatika. — 2017. — № 1. — С. 32–39.
[2] Khosravipour A., Skidmore A. K., Isenburg M. Generating spike-free digital surface models using LiDAR raw point clouds: A new approach for forestry applications // International Journal of Applied Earth Observation and Geoinformation. — 2016. — №52. — pp. 104–114.
[3] Khosravipour A., Skidmore A. K., Isenburg M., Wang T., Hussin Y. A. Development of an algorithm to generate a LiDAR pit-free canopy height model // 13th International conference on LiDAR Applications for Assessing forest ecosystems, Beijing, China. — 2013. — pp. 125–128.
[4] Khosravipour A., Skidmore A. K., Wang T., Isenburg M., Khoshelham K. Effect of slope on treetop detection using a LiDAR Canopy Height Model // ISPRS Journal of Photogrammetry and Remote Sensing. — 2015. — №104. — pp. 44–52.
[5] Rapidlasso GmbH official page, URL: https://rapidlasso.com (дата обращения: 20.08 2017)
[1] Novakovskij B. A., Kovach N. S., Entin A. L., Kalinovskij L. V. Geoinformacionnoe kartografirovanie lesnogo pokrova po materialam vozdushnogo lazernogo skanirovaniya // Geoinformatika/Geoinformatika. — 2017. — № 1. — S. 32–39.
[2] Khosravipour A., Skidmore A. K., Isenburg M. Generating spike-free digital surface models using LiDAR raw point clouds: A new approach for forestry applications // International Journal of Applied Earth Observation and Geoinformation. — 2016. — №52. — pp. 104–114.
[3] Khosravipour A., Skidmore A. K., Isenburg M., Wang T., Hussin Y. A. Development of an algorithm to generate a LiDAR pit-free canopy height model // 13th International conference on LiDAR Applications for Assessing forest ecosystems, Beijing, China. — 2013. — pp. 125–128.
[4] Khosravipour A., Skidmore A. K., Wang T., Isenburg M., Khoshelham K. Effect of slope on treetop detection using a LiDAR Canopy Height Model // ISPRS Journal of Photogrammetry and Remote Sensing. — 2015. — №104. — pp. 44–52.
[5] Rapidlasso GmbH official page, URL: https://rapidlasso.com (data obrashheniya: 20.08.2017)
Калиновский Л. В. – бакалавр географии по специальности картография и геоинформатика, магистрант 2-го года обучения.
Новаковский Б. А. – профессор кафедры картографии и геоинформатики, доктор географических наук.
Kalinovskiy L. V. – Bachelor of Geography in the specialty of cartography and geoinformatics, Master of 2-nd year.
Novakovskiy B. A. – Professor of the Department of Cartography and Geoinformatics, Doctor of Geographical Sciences.