

Пример исходных данных гидролокации бокового обзора представлен на рис. 3.4.1.
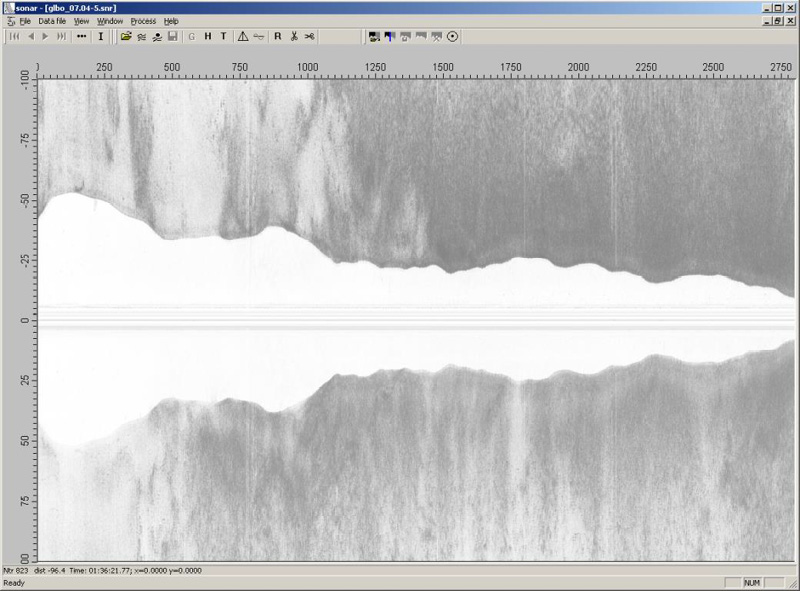
Рис. 3.4.1. Пример исходных данных гидролокатора бокового обзора
В общем случае обработка данных гидролокации бокового обзора состоит из следующих процедур:
- пикировка первых вступлений (рис. 3.4.2);
- ввод поправки за наклонную дальность (рис. 3.4.3);
- коррекция амплитуд (рис. 3.4.4);
- контроль качества позиционирования данных;
- построение планшетов акустической мозаики (рис. 3.4.5).
Для определения линии первых вступлений в большинстве случаев используется автоматический алгоритм (рис. 3.4.2). На участках, где алгоритм ошибается (поверхность дна с малой амплитудой рассеянного сигнала или наличия шума в водной толще) используется ручная коррекция результатов автоматической пикировки.
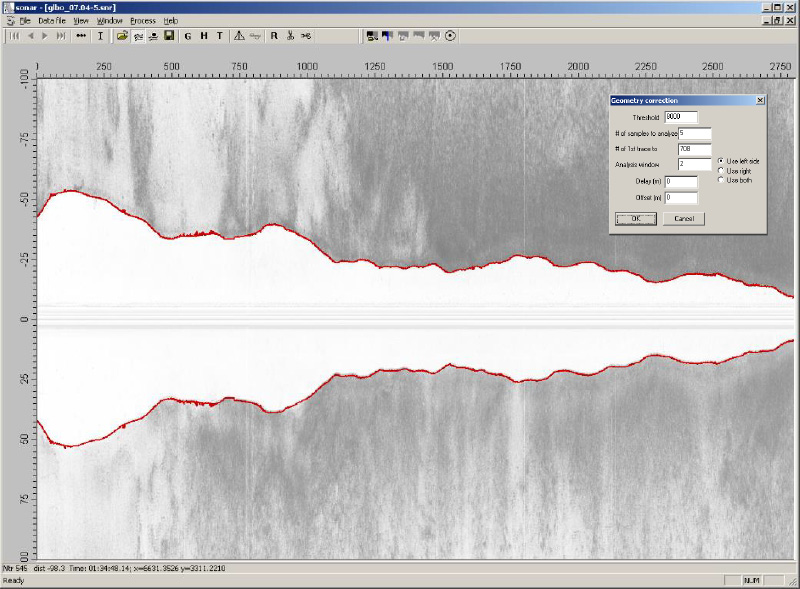
Рис. 3.4.2. Пример работы алгоритма автоматического определения линии дна
Следующим этапом является коррекция за наклонную дальность, когда сонограмма по трассам пересчитывается из времен по наклонной дальности в расстояния в горизонтальной плоскости (рис. 3.4.3).
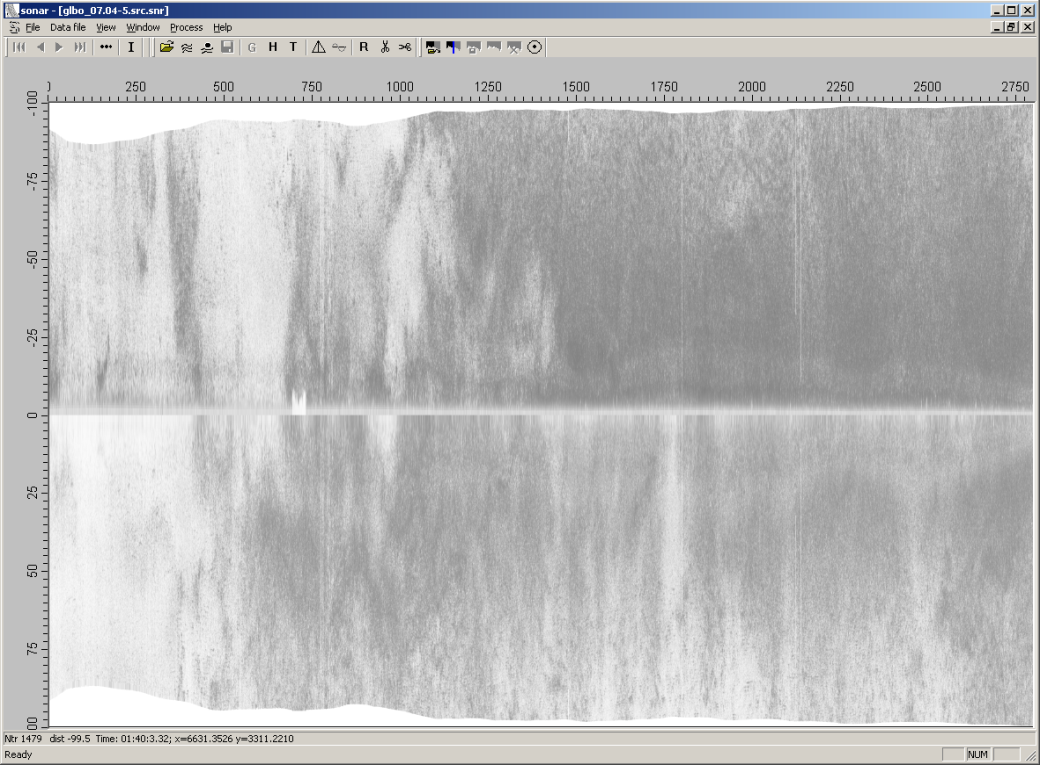
Рис. 3.4.3. Данные гидролокатора после коррекции за наклонную дальность
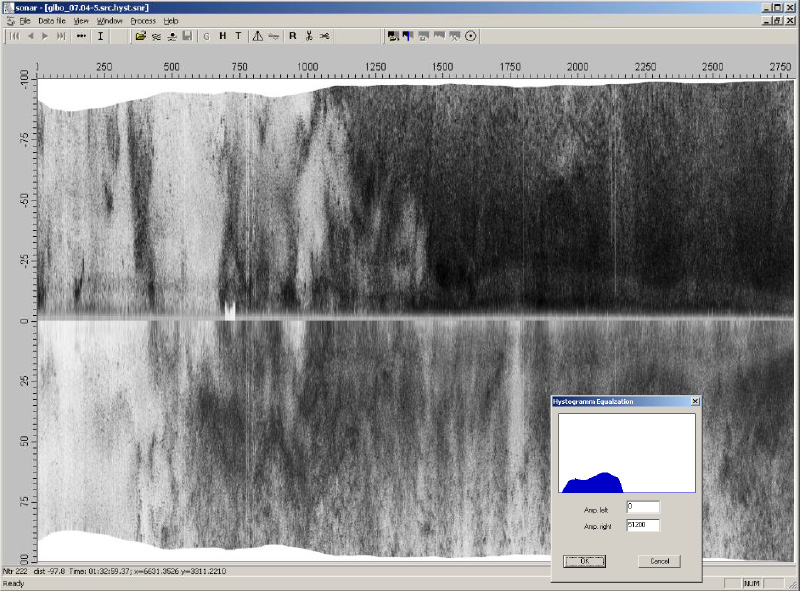
Рис. 3.4.4. Данные гидролокатора после применения амплитудной коррекции
Амплитудная коррекция применяется для повышения контрастности записи и компенсации диаграммы направленности прибора.
Далее все профили наносятся на один планшет, формируя карту величин обратного рассеяния или мозаику (рис. 3.4.5).
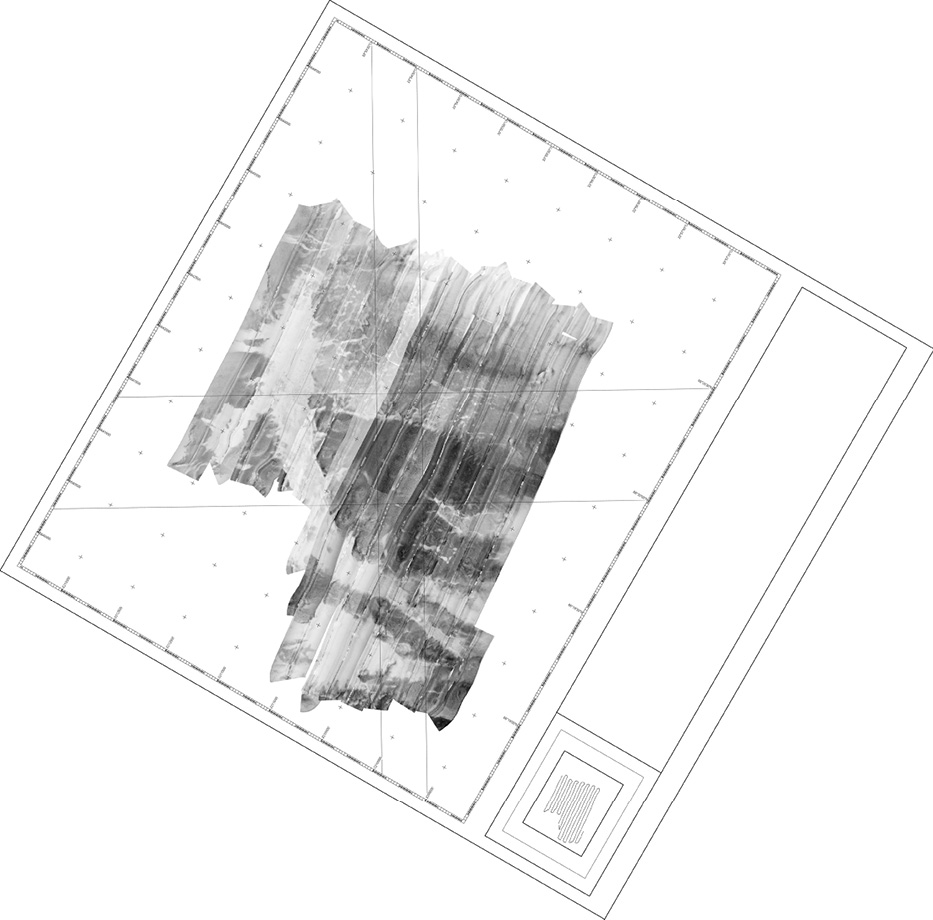
Рис. 3.4.5. Карта величин обратного рассеяния (мозаика ГЛБО)